레이더 스테이션: 역사 및 기본 작동 원리. 이제 "Made with us" 및 Telegram of Mobile Radars에 있습니다.
러시아 항공 및 미사일 방어 사령부 구조에서 가장 경계심이 강한 곳은 초수평 레이더 기지입니다. 오늘날 가장 현대적인 것은 지구 전리층의 무선 신호 반사 효과를 이용하는 컨테이너 레이더입니다. 컨테이너 레이더는 항공우주 공격에 대한 정찰 및 경고 시스템의 수단 중 하나입니다.
“스테이션의 기능을 통해 모니터링할 수 있습니다. 공기 상태책임 영역에서는 적 전투기의 행동 성격을 밝히고 공습에 대해 경고합니다.”라고 그들은 지적합니다.
지금까지 그러한 레이더 기지는 러시아에서 단 하나만 운영되고 있습니다. Mordovian 마을 Kovylkino에서 Gazeta.Ru가 알게 된 것처럼 두 번째 기지는 아무르 지역의 Zeya시 근처에 건설되고 있습니다.
대공 미사일 방어 시스템의 일부인 최초의 최신 초수평 레이더가 모르도비아에서 실험적인 전투 임무(테스트 모드에서 작동)에 들어갔습니다. 2013년 12월 .
그 임무는 3,000km 이상의 거리에 있는 다양한 공중 표적의 좌표를 감지하고 결정하기 위해 서쪽 방향을 모니터링하는 것입니다. 북서쪽 방향에서 레이더는 폴란드, 독일, 발트해까지, 남서쪽에서는 터키, 시리아 및 이스라엘까지 영토를 모니터링합니다. 스테이션 개요 - 180°. 2017년까지 컨테이너가 장착되어 방위각 240°의 소형 항공기를 포함한 모든 공기역학적 표적을 탐지할 수 있게 될 것입니다.
연구생산단지 '장거리 무선통신 연구소'()에서 개발한 '컨테이너'는 10층 건물 높이의 안테나에서 신호를 수신하고 방출하는 144개의 마스트 구조입니다. 수신기 안테나와 레이더의 주요 하드웨어는 코빌키노 근처에 배치되었고, 송신기 안테나는 코빌키노 근처에 배치되었습니다. 니즈니노브고로드 지역고로데츠 근처.
function.mil.ru
항공우주 방어 분야의 한 전문가는 Gazeta.Ru에 "컨테이너"는 탄도 미사일(예를 들어 보로네시 미사일 공격 경고 시스템 스테이션처럼)뿐만 아니라 해상 표적과 비행기도 탐지할 수 있는 스테이션이라고 설명했습니다. 그는 "'컨테이너'는 원칙적으로 미사일 공격 경고 임무에 사용되지 않는다"고 밝혔다.
“이제 가장 끔찍한 무기는 미국이 잠수함에 장착하여 탄도 미사일을 제거하는 극초음속 순항 미사일입니다. 그리고 오늘날에는 "컨테이너" 유형의 스테이션보다 더 좋은 것은 없습니다. 이 기지는 최대 6,000km 거리에서 탄도미사일을 탐지하는 문제를 해결할 수 있으며, 소련 시대에 붉은 광장에 착륙한 세스나(Cessna)까지의 모든 항공기는 최대 35,000km 거리에서 탐지할 수 있습니다.”라고 그는 말했습니다. " Gazeta.Ru"와의 대화 중 수석 디자이너 ZGRLS "컨테이너", 물리 및 수학 과학 후보 Valery Alabastrov.
지금까지 모르도비아의 공중 표적에 대한 수평선 위 탐지를 위한 590번째 별도 무선 공학 부대의 군인들이 최신 레이더를 테스트하고 지정된 사항의 실제 확인에 참여하고 있습니다. 전술적, 기술적 특성현재 전투 능력을 명확히합니다. 차례대로 새로운 마스트의 기반을 구축합니다.레이더 송신 장치와 지휘소 건설을 완료했으며 가까운 시일 내에 엔지니어링 시스템 구축 작업이 이곳에서 시작될 것입니다.
Valery Alabastrov가 Gazeta.Ru에 말했듯이 현대 기술모든 레이더 요소는 본질적으로 모듈식입니다. 이는 해결되는 작업에 따라 송신 및 수신 스테이션에 서로 다른 수의 송신기 및 수신기가 있을 수 있음을 의미합니다.
“내 추정에 따르면 코빌키 역을 완성하려면 전체적으로 약 5천만 루블을 지출해야 합니다.
이는 수신기가 있는 컨테이너 두 개를 Kovylkino로 가져오고 컨테이너 두 개를 Gorodets, 송신 부분으로 가져오는 것을 의미합니다.”라고 디자이너는 말했습니다.
그에 따르면 기지 지휘소에는 지구물리학자, 탐지 채널 운영자, 이착륙 알고리즘 운영자 등 민간인이 점유할 수 있는 작업장만 5개만 있어야 한다.
대담자는 Kovylkino의 안테나에 유럽뿐만 아니라 중동의 영공을 제어할 수 있는 두 번째 관측 구역을 장착할 계획이라고 덧붙였습니다. 이란, 이라크 등 남동쪽 방향을 담당하는 또 다른 부문이 있습니다.
“미래에는 Zeya시 근처에 또 다른 역 건설이 예정되어 있습니다. 극동캄차카에서 뉴질랜드, 중국에 이르는 태평양 지역을 통제하게 될 것입니다.”라고 Alabastrov는 Gazeta.Ru에 말했습니다.
그는 이미 제야에서 정찰이 이루어졌고 '컨테이너'가 배치될 장소가 선택되었다고 설명했다. 동쪽 너머 지평선 허브는 향후 2년 내에 건설되어야 합니다.
어떻게 말했다현지 언론에 따르면 Zeya 부대 사령관 Alexander Listopad는 도시에서 19km 떨어진 구 공항 지역과 이전 위치의 영토에서 레이더 기지 건설이 진행 중이라고 말했습니다. 대공미사일부대. “제야에서 꽤 떨어진 곳에 두 지점이 있을 겁니다. 안테나가 설치될 각 스테이션의 크기는 상당히 큽니다. 결국 안테나 층만 해도 최소 1.5km를 차지합니다. 또한 행정 및 경제 부분은 도시 영토에 위치하게 될 것입니다.”라고 Listopad는 말했습니다.
제작 경험을 바탕으로 컨테이너 레이더를 개발하였습니다. 시운전초수평선 탐지 레이더 스테이션 "Duga", 그 중 하나는 체르노빌에 건설되었습니다. Alabastrov가 설명했듯이 "컨테이너"의 디자인은 진동기의 무게가 각각 500kg이고 "컨테이너"의 진동기가 5-6kg 인 체르노빌 "Arc"의 디자인보다 가볍습니다.
초수평 레이더는 전리층에서 나오는 짧은 전파(3~30MHz, 데시미터파)의 반사 효과를 사용합니다. 한 번 또는 반복적으로 반사된 전파는 지상에 도달하여 비행기, 기차, 선박, 로켓 이륙 등 다양한 인공 표적에서 다시 반사될 수 있습니다. 이미 반사된 신호는 전리층을 통해 전송 장소로 돌아올 수 있습니다. 여기서 수학적 처리를 통해 그 특성을 이해할 수 있으며 스펙트럼의 도플러 이동 특성, 속도 및 방향을 이해할 수 있습니다. 움직임의.
항공우주 공격 정찰 및 경고 시스템(SRPVKN)은 항공우주 공격의 준비 및 시작에 대해 국가 지도부와 군대에 경고하는 문제를 해결하고 항공우주 방어의 제어 시스템 및 화기 무기에 정보를 제공해야 합니다.
작업은 관리자가 주도합니다. 실무그룹방사선 광자학에 관한 군사 산업위원회의 과학 기술 협의회 Alexey Nikolaevich Shulunov. 첫 번째 단계가 수행되었으며 성공한 것으로 간주될 수 있습니다. 지금은 공상과학처럼 느껴지던 클래식 레이더에 새로운 시대가 열리는 것 같다.
아마도 고등학교를 졸업한 사람이라면 누구나 레이더가 무엇인지 알고 있을 것입니다. 그리고 무선 광자 위치가 무엇인지는 매우 많은 전문가들에게 알려져 있지 않습니다. 그럼 쉽게 말하면 새로운 기술호환되지 않는 전파와 빛을 결합할 수 있습니다. 이 경우 전자의 흐름은 광자의 흐름으로 변환되어야 하며 그 반대의 경우도 마찬가지입니다. 어제 현실을 넘어서는 문제가 가까운 시일 내에 해결될 수 있습니다. 그것은 무엇을 줄 것인가?
예를 들어, 미사일 방어 및 우주 물체 추적을 위한 레이더 시스템의 기본은 거대한 레이더 단지입니다. 장비가 위치한 건물은 다층 건물입니다. 광자 기술을 사용하면 모든 제어 및 데이터 처리 시스템을 문자 그대로 여러 공간에 훨씬 더 작은 크기로 맞출 수 있습니다. 동시에 수천 킬로미터 거리에 있는 작은 물체도 감지할 수 있는 레이더의 기술적 능력은 더욱 향상될 것입니다. 또한, 포토닉 기술을 사용하기 때문에 표적 표시가 아닌 그 이미지가 레이더 화면에 나타나게 되는데, 이는 기존 레이더로는 얻을 수 없는 것입니다. 즉, 운영자는 일반적인 발광점 대신 비행기, 로켓, 새 떼 또는 운석 등 실제로 날아다니는 것을 볼 수 있으며 레이더에서 수천 킬로미터 떨어진 곳에서도 반복할 가치가 있습니다.
표적 표시는 아니지만 그 이미지가 광자 레이더 화면에 나타나며 이는 기존 레이더로는 얻을 수 없습니다.
이제 모든 레이더 시스템(군용 및 민간용)은 엄격하게 정의된 주파수 범위에서 작동하므로 기술 설계가 복잡해지고 레이더 명명법이 다양해집니다. 광자 레이더를 통해 우리는 최고 수준의 통합을 달성할 수 있습니다. 미터 값에서 밀리미터 주파수까지 매우 광범위한 작동 주파수를 즉시 조정할 수 있습니다.
소위 보이지 않는 평면이 미터 범위에서 명확하게 표시된다는 것은 오랫동안 비밀이 아니었지만 해당 좌표는 센티미터 및 밀리미터 범위의 스테이션에서 가장 잘 제공됩니다. 따라서 방공 시스템에서는 매우 큰 안테나를 갖춘 미터 스테이션과 더 작은 센티미터 스테이션이 동시에 작동합니다. 그러나 장거리 주파수 범위의 공간을 스캐닝하는 광자 레이더는 동일한 "보이지 않음"을 쉽게 감지하고 즉시 광대역 신호로 전환하여 고주파, 높이와 범위의 정확한 좌표를 결정합니다.
이것은 단지 위치에 관한 것입니다. 전자전, 정보 전송 및 보호, 컴퓨팅 기술 등에서 혁명적인 변화가 일어날 것입니다. 방사선 광자학은 영향을 받지 않을 것이라고 말하는 것이 더 쉽습니다.
본질적으로 원칙적으로 생성됩니다. 신산업첨단산업. 이 작업은 매우 복잡하므로 국내의 많은 주요 연구 센터, 대학 과학, 산업 기업. Shulunov에 따르면 이 작업은 국방부, 경제개발부, 과학교육부와 긴밀히 협력하여 수행되고 있습니다. 최근 러시아 대통령이 그들을 통제했습니다.
현대전은 빠르고 순간적입니다. 종종 전투 충돌에서 승자는 잠재적인 위협을 가장 먼저 감지하고 이에 적절하게 대응하는 사람입니다. 70년 이상 동안 전파 방출과 다양한 물체의 반사를 기록하는 레이더 방식을 사용하여 육상, 해상 및 공중에서 적을 수색했습니다. 이러한 신호를 보내고 받는 장치를 레이더 스테이션(RLS) 또는 레이더라고 합니다.
"radar"라는 용어는 1941년에 유통되기 시작한 영어 약어(radio detector and Ranging)이지만 오래 전부터 독립적인 단어가 되어 세계 대부분의 언어에 입력되었습니다.
물론 레이더의 발명은 획기적인 사건이다. 현대 세계레이더 스테이션 없이는 상상하기 어렵습니다. 그들은 항공, 해상 운송에 사용되며 레이더의 도움으로 날씨를 예측하고 규칙 위반자를 식별합니다. 교통, 지구 표면이 스캔됩니다. 레이더 시스템(RLC)은 우주 산업과 내비게이션 시스템에 적용되었습니다.
그러나 레이더는 군사 업무에서 가장 널리 사용되는 것으로 나타났습니다. 이 기술은 원래 군사용으로 개발돼 제2차 세계대전 발발 직전에 실용화 단계에 이르렀다고 해야 할 것이다. 이 충돌에 적극적으로 참여하는 모든 가장 큰 국가는 적 선박과 항공기의 정찰 및 탐지를 위해 레이더 스테이션을 사용했습니다. 레이더의 사용이 유럽과 태평양 전역의 여러 획기적인 전투의 결과를 결정했다고 자신있게 말할 수 있습니다.
오늘날 레이더는 대륙간 탄도 미사일 발사 추적부터 포병 정찰까지 매우 광범위한 군사 임무를 해결하는 데 사용됩니다. 각 비행기, 헬리콥터, 군함에는 자체 레이더 단지가 있습니다. 레이더는 대공 방어 시스템의 중추입니다. 최신 위상 배열 레이더 시스템이 유망한 러시아 Armata 탱크에 설치될 예정입니다. 일반적으로 현대 레이더의 다양성은 놀랍습니다. 이들은 크기, 특성 및 목적이 다른 완전히 다른 장치입니다.
오늘날 러시아는 레이더 개발 및 생산 분야에서 세계적으로 인정받는 리더 중 하나라고 자신있게 말할 수 있습니다. 그러나 레이더 시스템 개발 추세에 대해 이야기하기 전에 레이더 작동 원리와 레이더 시스템의 역사에 대해 몇 마디 말해야 합니다.
레이더는 어떻게 작동하나요?
위치는 어떤 것의 위치를 결정하는 방법(또는 프로세스)입니다. 따라서 레이더란 레이더 또는 레이더라는 장치에서 방출되고 수신되는 전파를 이용하여 우주에 있는 물체나 물체를 탐지하는 방법이다.
기본 또는 수동 레이더의 물리적 작동 원리는 매우 간단합니다. 전파를 공간으로 전송하고 주변 물체에서 반사되어 반사된 신호의 형태로 돌아옵니다. 이를 분석함으로써 레이더는 공간의 특정 지점에서 물체를 감지할 수 있을 뿐만 아니라 속도, 고도, 크기 등 주요 특성을 표시할 수 있습니다. 모든 레이더는 많은 구성 요소로 구성된 복잡한 무선 장치입니다.
모든 레이더는 신호 송신기, 안테나 및 수신기의 세 가지 주요 요소로 구성됩니다. 모든 레이더 스테이션은 두 개의 큰 그룹으로 나눌 수 있습니다.
- 맥박;
- 지속적인 행동.
펄스 레이더 송신기는 짧은 시간(몇 분의 1초) 동안 전자기파를 방출하며, 첫 번째 펄스가 수신기로 다시 돌아온 후에만 다음 신호가 전송됩니다. 펄스 반복률은 레이더의 가장 중요한 특성 중 하나입니다. 저주파 레이더는 분당 수백 펄스를 보냅니다.
펄스 레이더 안테나는 수신과 송신 모두에 사용됩니다. 신호가 방출된 후 송신기가 잠시 꺼지고 수신기가 켜집니다. 복용 후에는 반대 과정이 발생합니다.
펄스 레이더에는 단점과 장점이 모두 있습니다. 그들은 한 번에 여러 표적의 범위를 결정할 수 있습니다. 이러한 레이더는 하나의 안테나로 쉽게 수행할 수 있습니다. 이러한 장치의 표시기는 간단합니다. 그러나 그러한 레이더에서 방출되는 신호는 상당히 높은 전력을 가져야 합니다. 또한 모든 최신 추적 레이더는 펄스 회로를 사용하여 만들어졌다고 덧붙일 수도 있습니다.
펄스 레이더 스테이션에서는 일반적으로 마그네트론 또는 진행파 튜브가 신호 소스로 사용됩니다.
레이더 안테나는 전자기 신호의 초점을 맞추고 방향을 지정하며 반사된 펄스를 포착하여 수신기로 전송합니다. 서로 다른 안테나로 신호를 수신하고 전송하는 레이더가 있으며 서로 상당한 거리에 위치할 수 있습니다. 레이더 안테나는 전자파를 원형으로 방출하거나 특정 구역에서 작동할 수 있습니다. 레이더 빔은 나선형으로 향하거나 원뿔 모양으로 향할 수 있습니다. 필요한 경우 레이더는 특수 시스템을 사용하여 안테나를 지속적으로 겨냥하여 움직이는 표적을 추적할 수 있습니다.
수신기의 기능에는 수신된 정보를 처리하고 이를 운영자가 읽을 수 있는 화면으로 전송하는 것이 포함됩니다.
펄스 레이더 외에도 지속적으로 전자기파를 방출하는 연속 레이더도 있습니다. 이러한 레이더 스테이션은 작업에 도플러 효과를 사용합니다. 빈도가 높다는 사실에 있습니다. 전자기파신호 소스에 접근하는 물체에서 반사되는 양은 멀어지는 물체에서 반사되는 양보다 높습니다. 이 경우 방출되는 펄스의 주파수는 변경되지 않습니다. 이 유형의 레이더는 고정된 물체를 감지하지 못합니다. 수신기는 방출된 것보다 높거나 낮은 주파수의 파동만 포착합니다.
일반적인 도플러 레이더는 교통경찰이 차량의 속도를 결정하는 데 사용하는 레이더입니다.
연속파 레이더의 주요 문제점은 물체까지의 거리를 확인할 수 없다는 점이지만, 작동 중에는 레이더와 표적 사이 또는 그 뒤에 있는 정지 물체의 간섭이 없습니다. 또한 도플러 레이더는 작동하는 데 저전력 신호만 필요한 매우 간단한 장치입니다. 또한 현대의 연속파 레이더 스테이션에는 물체까지의 거리를 결정할 수 있는 능력이 있다는 점도 주목해야 합니다. 이는 작동 중에 레이더 주파수를 변경하여 수행됩니다.
펄스 레이더 작동의 주요 문제 중 하나는 정지 물체에서 발생하는 간섭입니다. 일반적으로 지표면, 산, 언덕이 여기에 해당합니다. 항공기에 탑재된 펄스 레이더가 작동하면 아래에 있는 모든 물체는 지표면에서 반사되는 신호에 의해 "가려집니다". 지상 기반 또는 선박 기반 레이더 시스템에 대해 이야기하면 이 문제는 낮은 고도에서 비행하는 표적을 탐지할 때 나타납니다. 이러한 간섭을 제거하기 위해 동일한 도플러 효과가 사용됩니다.
기본 레이더 외에도 항공에서 항공기를 식별하는 데 사용되는 소위 보조 레이더도 있습니다. 이러한 레이더 시스템에는 송신기, 안테나 및 수신기 외에 항공기 응답기도 포함됩니다. 전자기 신호를 조사하면 트랜스폰더에서 문제가 발생합니다. 추가 정보고도, 경로, 항공기 번호, 국적에 대해.
레이더 스테이션은 작동하는 파도의 길이와 주파수에 따라 구분될 수도 있습니다. 예를 들어, 지구 표면을 연구하고 상당한 거리에서 작업하려면 0.9-6m(주파수 50-330MHz) 및 0.3-1m(주파수 300-1000MHz)의 파도가 사용됩니다. 항공 교통 관제에는 파장 7.5~15cm의 레이더가 사용되며, 미사일 발사 탐지소의 초수평 레이더는 길이 10~100m의 파도에서 작동한다.
레이더의 역사
레이더에 대한 아이디어는 전파가 발견된 직후에 나타났습니다. 1905년 독일 회사 Siemens의 직원인 Christian Hülsmeyer는 전파를 사용하여 대형 금속 물체를 감지할 수 있는 장치를 만들었습니다. 발명가는 시야가 좋지 않은 조건에서 충돌을 피할 수 있도록 선박에 설치할 것을 제안했습니다. 그러나 선박 회사들은 새로운 장치에 관심이 없었습니다.
레이더 실험은 러시아에서도 수행되었습니다. 19세기 후반에 러시아 과학자 포포프는 금속 물체가 전파 전파를 방해한다는 사실을 발견했습니다.
20대 초반 미국 엔지니어 Albert Taylor와 Leo Young은 전파를 사용하여 지나가는 선박을 탐지했습니다. 그러나 당시 무선 엔지니어링 산업의 상황은 레이더 스테이션의 산업 샘플을 만드는 것이 어려울 정도였습니다.
실질적인 문제를 해결하는 데 사용할 수 있는 최초의 레이더 스테이션은 1930년대 중반 영국에 나타났습니다. 이 장치는 매우 커서 육지나 갑판에만 설치할 수 있었습니다. 대형 선박. 항공기에 장착할 수 있는 소형 레이더의 프로토타입이 제작된 것은 1937년이었습니다. 제2차 세계대전이 시작될 무렵 영국은 체인 홈(Chain Home)이라는 레이더 기지 체인을 배치했습니다.
우리는 독일에서 새로운 유망한 방향으로 나아가고 있었습니다. 그리고 성공하지 못한 것은 아니라고 말하고 싶습니다. 이미 1935년에 음극선 디스플레이를 갖춘 실제 레이더가 독일 해군 총사령관 Raeder에게 시연되었습니다. 나중에 해군용 Seetakt와 대공방어용 Freya라는 일련의 레이더 모델이 만들어졌습니다. 1940년에 뷔르츠부르크 레이더 사격 통제 시스템이 독일군에 도입되기 시작했습니다.
그러나 레이더 분야에서 독일 과학자 및 엔지니어의 명백한 업적에도 불구하고 독일군은 영국군보다 늦게 레이더를 사용하기 시작했습니다. 히틀러와 제국 수뇌부는 레이더를 승리한 독일군에 특별히 필요하지 않은 방어용 무기로만 간주했습니다. 이러한 이유로 영국 전투가 시작될 때 독일군은 단지 8개의 프레야 레이더 기지를 배치했지만 그 특성은 적어도 영국군만큼 좋았습니다. 일반적으로 영국 전투의 결과와 이후 유럽 하늘에서 독일 공군과 연합군 간의 대결을 결정한 것은 레이더의 성공적인 사용이라고 말할 수 있습니다.
나중에 독일군은 뷔르츠부르크 시스템을 기반으로 "Kammhuber 라인"이라고 불리는 방공 라인을 만들었습니다. 구분 사용 특수 목적, 연합군은 독일 레이더 작동의 비밀을 밝힐 수 있었고 이를 통해 효과적으로 레이더를 방해할 수 있었습니다.
영국인은 미국과 독일보다 늦게 "레이더" 경주에 참가했음에도 불구하고 가장 발전된 항공기 레이더 탐지 시스템을 사용하여 결승선에서 그들을 추월하고 제2차 세계 대전이 시작될 때까지 접근했습니다.
이미 1935년 9월에 영국군은 전쟁 전에 이미 20개의 레이더 기지를 포함하고 있던 레이더 기지 네트워크를 구축하기 시작했습니다. 이는 유럽 해안에서 영국 제도로의 접근을 완전히 차단했습니다. 1940년 여름, 영국 엔지니어들은 공진형 마그네트론을 만들었고, 이는 나중에 미국과 영국 항공기에 설치된 공중 레이더 스테이션의 기초가 되었습니다.
군용 레이더 분야의 작업도 소련에서 수행되었습니다. 소련의 레이더 스테이션을 사용하여 항공기를 탐지하는 첫 번째 성공적인 실험은 30년대 중반에 수행되었습니다. 1939년에 최초의 레이더 RUS-1이 적군에 채택되었고, 1940년에는 RUS-2가 채택되었습니다. 이 두 스테이션 모두 대량 생산에 투입되었습니다.
제2차 세계대전은 레이더 기지 사용의 높은 효율성을 분명히 보여주었습니다. 따라서 완성 이후에는 신형 레이더 개발이 우선 개발 분야 중 하나가 됐다. 군용 장비. 시간이 지남에 따라 모든 군용 항공기와 선박은 예외 없이 공중 레이더를 받았고 레이더는 대공 방어 시스템의 기초가 되었습니다.
냉전 기간 동안 미국과 소련은 대륙간 탄도 미사일이라는 새로운 파괴 무기를 획득했습니다. 이 미사일의 발사 탐지는 생사의 문제가 되었습니다. 소련 과학자 Nikolai Kabanov는 단거리 전파를 사용하여 장거리(최대 3,000km)에서 적 항공기를 탐지하는 아이디어를 제안했습니다. 그것은 매우 간단했습니다. Kabanov는 10-100m 길이의 전파가 전리층에서 반사되어 지구 표면의 목표물을 조사하여 동일한 방식으로 레이더로 돌아올 수 있다는 것을 발견했습니다.
이후 이 아이디어를 바탕으로 탄도미사일 발사를 수평선 너머로 탐지하는 레이더가 개발되었습니다. 이러한 레이더의 예로는 수십 년 동안 소련 미사일 발사 경고 시스템의 기반이었던 레이더 기지인 Daryal이 있습니다.
현재 레이더 기술 개발에서 가장 유망한 분야 중 하나는 위상 배열 레이더(PAR)의 생성입니다. 이러한 레이더에는 하나가 아닌 수백 개의 전파 방출기가 있으며 그 작동은 강력한 컴퓨터에 의해 제어됩니다. 전파가 방출됨 다양한 소스위상 배열에서는 위상이 같으면 서로를 향상시킬 수 있고, 반대로 서로를 약화시킬 수 있습니다.
위상 배열 레이더 신호는 원하는 형태로 제공될 수 있고, 안테나 자체의 위치를 변경하지 않고도 공간에서 이동할 수 있으며, 다양한 방사 주파수에서 작동할 수 있습니다. 위상 배열 레이더는 기존 안테나가 있는 레이더보다 훨씬 더 안정적이고 민감합니다. 그러나 이러한 레이더에는 단점도 있습니다. 큰 문제는 위상 배열 레이더의 냉각이며, 제조가 어렵고 비용이 많이 듭니다.
새로운 위상배열 레이더가 5세대 전투기에 설치되고 있습니다. 이 기술은 미국의 미사일 공격 조기 경보 시스템에 사용된다. 위상 배열 레이더 시스템은 최신 러시아 Armata 탱크에 설치될 예정입니다. 러시아는 위상배열 레이더 개발 분야의 세계 선두주자 중 하나라는 점에 유의해야 합니다.
궁금한 점이 있으면 기사 아래 댓글에 남겨주세요. 우리 또는 방문자가 기꺼이 답변해 드리겠습니다.
군사 대학 군사 대공
러시아 연방군 방어
(지점, 오렌부르크)
레이더무기학과(정찰레이더 및 ACS)
전. 아니요. _____
정찰레이더 설계 및 운용 제1부 9s18m1 레이더 설계
교과서로 채택
사관생도 및 대학생을 대상으로,
훈련 센터, 연결 및 부품
군사 대공 방어
러시아 연방군
이 교과서는 정찰 레이더 기지의 설계 및 운영을 연구하는 러시아 연방 군대의 대학, 훈련 센터, 구조물 및 군 방공 부대의 생도 및 학생을 대상으로 작성되었습니다.
교과서의 첫 번째 부분에는 9S18M1 레이더 스테이션에 대한 정보가 포함되어 있습니다.
두 번째 부분은 1L13 레이더 스테이션에 관한 것입니다.
세 번째는 레이더 스테이션 9S15M, 9S19M2, 35N6과 레이더 정보 처리 포스트 9S467-1M에 관한 것입니다.
교과서의 특징은 러시아 군대의 군사 항공 방어 대학(지부, Orenburg), 레이더 무기 부서 및 군대에서 축적된 경험을 활용합니다.
교과서의 1부는 군사과학 후보, 부교수, 소장 Chukin L의 지도력 하에 러시아 연방 군사방공대학(오렌부르크 지점) 저자 팀에 의해 개발되었습니다. . 중.
다음이 작업에 참여했습니다. 군사 과학 후보자, 부교수, Shevchun F.N. 대령; 군사 과학 후보자, 부교수, Shchipakin A.Yu 중령; Golchenko I.P. 중령; Kalinin D.V. 중령; 부교수, Lyapunov Yu.I. 중령; 교육학 후보자, Sukhanov P.V. 대위; 기술 과학 후보자, Rychkov A.V. 대위; Grigoriev G.A. 중령; 교육학 후보자, Dudko A.V.
RF 군대의 방공 책임자가 "정찰 레이더의 설계 및 작동" 분야 교과서로 승인했습니다.
이 교과서는 초판이며, 저자 팀은 이 교과서에 있을 수 있는 단점이 독자들에게 심각한 장애가 되지 않기를 바라고, 교과서 개선을 위한 피드백과 제안에 감사드립니다. 모든 피드백과 제안은 다음 버전을 준비할 때 고려됩니다.
주소 및 전화번호: 460010, Orenburg, st. Pushkinskaya 63, FVU RF 군대, 레이더 무기부; t. 8-353-2-77-55-29(교환대), 1-23(부서).
소개 5
약어 목록 및 기호 7
나. 일반 정보 9S18M1 레이더에 대해. 메인의 구조 설계 및 배치 구성요소 9
1.1 9S18M1 레이더의 목적, 구성 및 설계 특징 10
1.2 레이더의 성능특성 12
1.3 레이더의 작동 모드 14
1.4 레이더 주요 구성요소의 설계 및 배치 17
II. 레이더 장비 9S18M1
2.1 에 대한 간략한 설명레이더 장비의 장치 및 시스템 24
2.2 블록 다이어그램 26에 따른 9S18M1 레이더의 작동
2.3 구조 및 기능 다이어그램에 따른 9S18M1 레이더 작동 31
2.4 공간검토 조직 44
2.5 전원 공급 시스템 53
2.6 레이더 송신 장치 9S18M1 액체 냉각 시스템 79
2.7 9S18M1 레이더 안테나 장치. 도파관 공급 장치 91
2.8 레이더 수신 장치 9S18M1 102
2.9 레이더용 방해 전파 방지 장치 9С18М1 114
2.10 레이더 처리 및 제어 장치 9S18M1 126
2.10.1 동기화 및 인터페이스 장비 139
2.10.2 레이더 정보 레이더 처리 장비 9S18M1 150
2.10.3 레이더 운영자 콘솔 9S18M1 153
2.10.4 전문 디지털 컴퓨팅 장치 160
2.11 지상 레이더 질문기에 대한 일반 정보 167
2.12 표시 장치 171
2.13 데이터 전송 장비 187
2.14 외부 및 내부 통신 장비 195
2.15 안테나 회전 장치 레이더 9С18М1 201
2.16 레이더 안테나 배치 및 접이식 장치
2.17 레이더용 공기 냉각 시스템 9S18M1 216
2.18 항법, 방향 및 지형 장비 레이더 9S18M1 223
III. 기본 레이더 차량 9S18M1 243에 대한 일반 정보
IV. 9S18M1 레이더 261의 유지 보수 및 수리 수단에 대한 일반 정보
4.1 레이더 9S18M1 261용 내장 모니터링 및 문제 해결 시스템
4.2 예비 부품의 목적, 구성 및 배치. SPTA 272에서 필수 요소를 찾는 절차
4.3 MRTO 9V894의 유지보수 및 수리를 위한 목적, 구성 및 기능 275
M. 비노그라도프 대위,
기술 과학 후보자
항공기와 우주선에 설치된 최신 레이더 장비는 현재 가장 빠르게 발전하는 무선 전자 기술 분야 중 하나입니다. 이러한 수단의 구성에 기초가 되는 물리적 원리의 동일성은 이를 하나의 기사에서 고려하는 것을 가능하게 합니다. 우주 레이더와 항공기 레이더의 주요 차이점은 다음과 관련된 레이더 신호 처리 원리에 있습니다. 다른 크기조리개, 대기의 여러 층에서 레이더 신호 전파의 특성, 지구 표면의 곡률을 고려해야 할 필요성 등. 이러한 차이점에도 불구하고 합성 개구 레이더(SAR) 개발자는 달성하기 위해 모든 노력을 기울이고 있습니다. 이러한 정찰 도구 기능의 최대 유사성.
현재 합성 조리개를 갖춘 탑재 레이더를 사용하면 시각 정찰(다양한 모드로 지표면 촬영) 문제 해결, 이동 및 고정 표적 선택, 지상 상황 변화 분석, 숲 속에 숨어 있는 물체 촬영, 땅에 묻힌 작은 물체 탐지 등의 문제를 해결할 수 있습니다. 크기의 해양 물체.
SAR의 주요 목적은 지구 표면을 자세히 조사하는 것입니다.

|
|
| 쌀. 1. 현대 SAR의 조사 모드(a - 상세, b - 개요, c - 스캐닝) | 쌀. 2. 해상도 0.3m(상), 0.1m(하)의 실제 레이더 이미지 예시 |
|
|
| 쌀. 3. 다양한 세부 수준의 이미지 보기 | |

|

|
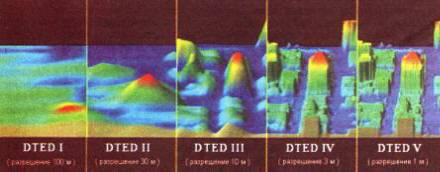
| 쌀. 4. 세부 수준 DTED2(왼쪽) 및 DTED4(오른쪽)에서 얻은 지구 표면의 실제 영역 조각의 예 | |
합성 간격에 걸쳐 반사된 레이더 신호를 일관되게 축적하는 것이 주요 원리인 온보드 안테나의 조리개를 인위적으로 증가시킴으로써 높은 각도 분해능을 얻을 수 있습니다. 최신 시스템에서는 센티미터 파장 범위에서 작동할 때 분해능이 수십 센티미터에 도달할 수 있습니다. 유사한 범위 분해능 값은 선형 주파수 변조(처프)와 같은 펄스 내 변조를 사용하여 달성됩니다. 안테나 조리개 합성 간격은 SAR 캐리어의 비행 고도에 정비례하므로 촬영 해상도가 고도와 무관합니다.
현재 지구 표면을 조사하는 데는 개요, 스캐닝, 상세의 세 가지 주요 모드가 있습니다(그림 1). 측량 모드에서는 지표면 측량이 획득 대역에서 연속적으로 수행되는 반면 측면 모드와 전면 측면 모드가 분리됩니다(안테나 방사 패턴의 메인 로브 방향에 따라 다름). 신호는 레이더 캐리어의 주어진 비행 조건에 대해 안테나 조리개를 합성하기 위해 계산된 간격과 동일한 시간 동안 축적됩니다. 스캐닝 촬영 모드는 촬영 범위의 너비와 동일한 줄무늬로 보기 범위의 전체 너비에 걸쳐 촬영이 수행된다는 점에서 측량 모드와 다릅니다. 이 모드는 우주 기반 레이더에서만 사용됩니다. 상세 모드에서 촬영하면 개요 모드에 비해 신호가 더 많은 간격으로 누적됩니다. 조사 영역이 사격 영역에 일정하게 유지되도록 레이더 캐리어의 이동과 동시에 안테나 방사 패턴의 메인 로브를 이동시켜 간격을 늘립니다. 최신 시스템을 사용하면 전체 모드의 경우 1m, 세부 모드의 경우 0.3m 정도의 해상도로 지구 표면과 그 위에 있는 물체의 이미지를 얻을 수 있습니다. Sandia 회사는 세부 모드에서 0.1m의 해상도로 측량할 수 있는 능력을 갖춘 전술 UAV용 SAR을 개발했다고 발표했습니다. 궤적 왜곡을 수정하기 위한 적응형 알고리즘이 중요한 구성 요소인 수신 신호의 디지털 처리 결과 방법은 SAR의 결과 특성(지구 표면 측량 측면에서)에 상당한 영향을 미칩니다. 개요 모드에서는 해상도에 대한 물리적 제한이 없지만 연속 개요 촬영 모드에서 세부 모드에 필적하는 해상도를 얻을 수 없는 것은 오랫동안 캐리어의 직선 궤적을 유지할 수 없다는 것입니다.
ISA(역 개구면 합성) 모드에서는 캐리어의 이동이 아닌 조사 대상의 이동으로 인해 안테나 개구를 합성할 수 있습니다. 이 경우, 우리는 지상 물체의 특징인 전진 운동에 대해 이야기하는 것이 아니라 파도에 흔들리는 부유 장비의 특징인 진자 운동(다른 평면에서의)에 대해 이야기할 수 있습니다. 이 기능은 IRSA의 주요 목적인 해양 물체의 탐지 및 식별을 결정합니다. 최신 IRSA의 특성으로 인해 잠망경과 같은 작은 크기의 물체도 확실하게 감지할 수 있습니다. 잠수함. 해안 지역과 수역 순찰을 포함하는 임무를 수행하는 미국 및 기타 국가의 군대에서 운용되는 모든 항공기는 이 모드에서 촬영할 수 있습니다. 촬영 결과로 얻은 이미지의 특성은 직접(비역) 조리개 합성으로 촬영한 결과로 얻은 이미지와 유사합니다.
간섭계 측량 모드(간섭계 SAR - IFSAR)를 사용하면 지구 표면의 3차원 이미지를 얻을 수 있습니다. 여기서 현대 시스템 3차원 이미지를 얻기 위해 단일 지점 촬영(즉, 하나의 안테나 사용)을 수행할 수 있는 능력이 있어야 합니다. 이미지 데이터를 특성화하기 위해 일반적인 해상도 외에도 높이 정확도 또는 높이 해상도라는 추가 매개변수가 도입됩니다. 이 매개변수의 값에 따라 3차원 이미지(DTED - Digital Terrain Elevation Data)의 여러 표준 그라데이션이 결정됩니다.
데도...........900 m
DTED1.............90m
DTED2............30m
DTED3............10m
DTED4.......................... Zm
DTED5............1m
다양한 세부 수준에 해당하는 도시화된 지역(모델)의 이미지 유형이 그림 1에 나와 있습니다. 삼.
레벨 3~5는 공식적으로 "데이터의 데이터"라고 합니다. 높은 해상도» (HRTe-고해상도 지형 고도 데이터). 레벨 0-2의 이미지에서 지상 물체의 위치는 WGS 84 좌표계에서 결정되며 높이는 제로 마크를 기준으로 측정됩니다. 고해상도 이미지의 좌표계는 현재 표준화되지 않았으며 논의 중입니다. 그림에서. 그림 4는 다양한 해상도의 스테레오 사진을 통해 얻은 지구 표면의 실제 영역 조각을 보여줍니다.
2000년에 미국 우주왕복선은 SRTM(Shuttle Radar Topography Mission) 프로젝트의 일환으로 대규모 지도 제작 정보를 얻는 것이 목표였으며 60에서 밴드의 지구의 적도 부분에 대한 간섭계 측량을 수행했습니다. ° 엔. w. 남쪽으로 56° sh., DTED2 형식의 지구 표면의 3차원 모델이 생성됩니다. 상세한 3D 데이터를 얻기 위해 NGA HRTe 프로젝트가 미국에서 개발되고 있습니까? 레벨 3~5의 이미지를 사용할 수 있습니다.
레이더 조사 외에 열린 공간탑재된 레이더는 관찰자의 눈에 보이지 않는 장면의 이미지를 얻을 수 있는 능력을 갖추고 있습니다. 특히, 숲속에 숨겨진 물체는 물론 지하에 있는 물체까지 탐지할 수 있습니다.
관통 레이더(GPR, Ground Penetating Radar)는 원격 감지 시스템으로, 작동 원리는 균질한(또는 상대적으로 균질한) 체적에 위치한 구성 영역에서 변형되거나 다른 것에서 반사된 신호를 처리하는 것을 기반으로 합니다. 지표면 조사 시스템을 사용하면 서로 다른 깊이에 위치한 공극, 균열 및 매설된 물체를 감지하고 서로 다른 밀도의 영역을 식별할 수 있습니다. 이 경우 반사된 신호의 에너지는 토양의 흡수 특성, 대상의 크기 및 모양, 경계 영역의 이질성 정도에 따라 크게 달라집니다. 현재 GPR은 군사적 응용 외에도 상업적으로 활용 가능한 기술로 발전했습니다.
지구 표면 조사는 10MHz - 1.5GHz 주파수의 펄스를 조사하여 발생합니다. 조사 안테나는 지구 표면에 위치하거나 선상에 위치할 수 있습니다. 항공기. 복사 에너지의 일부는 지구의 지하 구조 변화로 인해 반사되는 반면, 대부분은 더 깊은 곳으로 침투합니다. 반사된 신호가 수신되어 처리되고, 처리 결과가 디스플레이에 표시됩니다. 안테나가 움직이면 지하 토양층의 상태를 반영하는 연속 이미지가 생성됩니다. 실제로 반사는 서로 다른 물질(또는 한 물질의 서로 다른 상태)의 유전율 차이로 인해 발생하므로 프로빙을 통해 감지할 수 있습니다. 많은 수의균일한 질량의 지하층에 있는 자연적 및 인공적 결함. 침투 깊이는 조사 현장의 토양 상태에 따라 달라집니다. 신호 진폭(흡수 또는 산란)의 감소는 주로 토양의 여러 특성에 따라 달라지며, 그 중 가장 중요한 것은 전기 전도도입니다. 따라서 모래 토양은 탐사에 최적입니다. 점토질과 매우 습한 토양은 이에 적합하지 않습니다. 좋은 결과화강암, 석회석, 콘크리트와 같은 건조 재료의 프로빙을 보여줍니다.
방출되는 파동의 주파수를 높이면 감지 해상도를 향상시킬 수 있습니다. 그러나 주파수의 증가는 방사선 침투 깊이에 부정적인 영향을 미칩니다. 따라서 500-900MHz 주파수의 신호는 1-3m 깊이까지 침투하고 최대 10cm의 해상도를 제공할 수 있으며, 80-300MHz 주파수의 신호는 9-25m 깊이까지 침투합니다. , 그러나 해상도는 약 1.5m입니다.
지하 감지 레이더의 주요 군사 목적은 지뢰를 탐지하는 것입니다. 동시에 헬리콥터와 같은 항공기에 설치된 레이더를 사용하면 지뢰밭 지도를 직접 열 수 있습니다. 그림에서. 그림 5는 헬리콥터에 탑재된 레이더를 이용해 얻은 영상으로 대인지뢰의 위치를 반영하고 있다.
숲 속에 숨겨진 물체를 탐지하고 추적하도록 설계된 공중 레이더(FO-PEN - FOliage PENetating)를 사용하면 나무 수관에 숨겨진 작은 물체(움직이거나 고정된)를 탐지할 수 있습니다. 숲 속에 숨겨진 물체를 촬영하는 것은 일반 촬영과 유사하게 개요와 상세의 두 가지 모드로 수행됩니다. 평균적으로 측량 모드에서 획득 대역폭은 2km이므로 지구 표면 2x7km 영역의 출력 이미지를 얻을 수 있습니다. 세부 모드에서는 3x3km 구간에서 측량이 수행됩니다. 촬영 해상도는 주파수에 따라 다르며 20-50MHz 주파수에서 10m에서 200-500MHz 주파수에서 1m까지 다양합니다.
현대적인 이미지 분석 방법을 사용하면 상당히 높은 확률로 결과 레이더 이미지에서 물체를 탐지하고 식별할 수 있습니다. 이 경우 고해상도(1m 미만)와 낮은(최대 10m) 이미지 모두에서 감지가 가능하지만 인식에는 충분히 높은(약 0.5m) 해상도의 이미지가 필요합니다. 그리고 이 경우에도 우리는 간접적인 기호에 의한 인식에 대해서만 대부분 이야기할 수 있습니다. 왜냐하면 물체의 기하학적 모양은 나뭇잎에서 반사된 신호의 존재와 바람에 나뭇잎이 흔들리는 결과로 발생하는 도플러 효과로 인해 주파수 이동이 있는 신호입니다.
그림에서. 그림 6은 동일한 영역의 이미지(광학 및 레이더)를 보여줍니다. 광학 이미지에서는 보이지 않는 물체(자동차 기둥)가 레이더 이미지에서는 선명하게 보이지만 추상화를 통해 이러한 물체를 식별할 수 있습니다. 외부 표지판(도로에서의 움직임, 자동차 사이의 거리 등)은 불가능합니다. 왜냐하면 이 해상도에서는 물체의 기하학적 구조에 대한 정보가 전혀 없기 때문입니다.
생성된 레이더 이미지의 세부사항을 통해 여러 가지 다른 기능을 실제로 적용할 수 있었으며, 그 결과 다음과 같은 결과가 나왔습니다. 가능한 해결책여러 가지 중요한 실제 문제. 이러한 작업 중 하나는 특정 기간 동안 지구 표면의 특정 영역에서 발생한 변화를 추적하는 것, 즉 일관된 감지를 포함합니다. 기간은 일반적으로 해당 지역의 순찰 빈도에 따라 결정됩니다. 변화 추적은 순차적으로 획득된 특정 영역의 좌표별 결합 이미지 분석을 기반으로 수행됩니다. 이 경우 두 가지 수준의 분석 세부정보가 가능합니다.

|

|
| 그림 5. 서로 다른 편광으로 촬영할 때 3차원으로 표현된 지뢰밭 지도: 모델(오른쪽), 설치된 레이더를 사용하여 얻은 복잡한 지하 환경이 있는 지구 표면의 실제 영역 이미지 예(왼쪽) 헬리콥터를 타고 | |

|
|
| 쌀. 6. 숲길을 따라 이동하는 자동차 호송대가 있는 지역의 광학(위) 및 레이더(아래) 이미지 | |

|
|
첫 번째 수준은 중요한 변화를 감지하는 것과 관련되며 주요 내용을 전달하는 이미지의 진폭 판독값 분석을 기반으로 합니다. 시각정보. 대부분 이 그룹에는 생성된 두 개의 레이더 이미지를 동시에 보면 사람이 볼 수 있는 변경 사항이 포함됩니다. 두 번째 수준은 위상 판독 분석을 기반으로 하며 사람의 눈에는 보이지 않는 변화를 감지할 수 있습니다. 여기에는 도로 위의 흔적(자동차 또는 사람)의 모양, 창문 상태의 변화, 문("열림 - 닫힘") 등이 포함됩니다.
Sandia가 발표한 또 다른 흥미로운 SAR 기능은 레이더 비디오입니다. 이 모드에서는 연속 측량 모드의 특징인 섹션 간 안테나 조리개의 개별 형성이 병렬 다중 채널 형성으로 대체됩니다. 즉, 매 순간마다 하나가 아닌 여러 개의(수는 해결되는 작업에 따라 다름) 조리개가 합성됩니다. 형성된 조리개 수에 대한 일종의 아날로그는 일반 비디오 촬영의 프레임 속도입니다. 이 기능을 사용하면 수신된 신호의 도플러 주파수 분석을 기반으로 움직이는 타겟을 선택하는 표준 레이더에 대한 본질적인 대안인 응집성 감지 원리를 적용하여 수신된 레이더 이미지 분석을 기반으로 움직이는 타겟 선택을 구현할 수 있습니다. . 이러한 이동 대상 선택기 구현의 효율성은 상당한 하드웨어 및 소프트웨어 비용으로 인해 매우 의심스럽습니다. 따라서 이러한 모드는 매우 빠르게 움직이는 대상을 선택할 수 있는 새로운 기회에도 불구하고 선택 문제를 해결하는 우아한 방법에 지나지 않을 가능성이 높습니다. 저속(도플러 SDC에서는 사용할 수 없는 3km/h 미만). 고성능 요구 사항으로 인해 레이더 범위의 직접 비디오 녹화도 현재 사용되지 않으므로 실제로 이 모드를 구현하는 군사 장비의 작동 모델이 없습니다.
레이더 범위에서 지표면을 조사하는 기술을 개선하는 논리적인 연속은 수신된 정보를 분석하기 위한 하위 시스템의 개발입니다. 특히 시스템 개발이 중요해지고 있다. 자동 분석촬영 영역 내의 지상 물체를 감지, 강조 및 인식할 수 있는 레이더 이미지입니다. 이러한 시스템을 만드는 어려움은 레이더 이미지의 일관성 있는 특성, 큰 유효 산란 표면을 가진 대상을 조사할 때 나타나는 것과 유사한 인공 눈부심과 같은 아티팩트의 출현으로 이어지는 간섭 및 회절 현상과 관련이 있습니다. 또한 레이더 이미지의 품질은 유사한(해상도 측면에서) 광학 이미지의 품질보다 다소 낮습니다. 이 모든 것이 다음과 같은 사실로 이어집니다. 효과적인 구현레이더 이미지에서 물체를 인식하는 알고리즘은 현재 존재하지 않지만 이 분야에서 수행된 작업의 양과 최근에 달성한 특정 성공을 통해 가까운 미래에 평가 기능을 갖춘 지능형 무인 정찰 차량에 대해 이야기하는 것이 가능할 것임을 시사합니다. 자체 탑재 레이더 정찰 장비에서 수신한 정보를 분석한 결과를 바탕으로 지상 상황을 파악합니다.
개발의 또 다른 방향은 통합, 즉 여러 소스의 정보에 대한 후속 공동 처리와의 조정된 통합입니다. 이는 다양한 모드에서 조사하는 레이더일 수도 있고 레이더 및 기타 정찰 수단(광학, IR, 다중 스펙트럼 등)일 수도 있습니다.
따라서 안테나 조리개 합성 기능을 갖춘 최신 레이더를 사용하면 시간 및 시간에 관계없이 지구 표면에 대한 레이더 측량 수행과 관련된 광범위한 문제를 해결할 수 있습니다. 기상 조건, 이는 지구 표면의 상태와 그 위에 있는 물체에 대한 정보를 얻는 중요한 수단이 됩니다.
외국군사논평 제2호 2009 p.52-56