겨울 군사 교량 건설 조직. 군사 교량 훈련. 섹션: VAD의 저수위 목조 교량: 교과서. 용돈. 이 문서는 다음 위치에 있습니다.

쌀. 9.1. 수준기를 사용하여 해안 프로필 제거:
1레벨; 2-레일; 3개

쌀. 9.2. 플로트로 현재 속도 측정:
1-플로트; 2-마일스톤

쌀. 8.2. 교량 축 및 지지대의 고장: 1극(플래그); 2축 브리지; 3라인 익스트림 파일(랙); 4-참조 스테이크; 5개 스테이크(페그); 6축 지원; 해안 지원 로그의 7축; 8줄 직사각형



쌀. 8.3. 해안 지지대 축 위치 및 위치 결정:
a – 기준 스테이크에서 지지대 축까지의 거리; h b – 수위 위 해안 지지대 부지의 허용 높이; 1-참조 스테이크; 2열은 해안 지지축을 나타냅니다. 3-레일; 4레벨; 5개 마일스톤

쌀. 8.4. 각도기를 사용하여 지지축 배치:
1축 브리지; 2페그; 3개 더미; 4-못; 5-레일; 6축 지원

쌀. 8.5. 수심이 1m 이상인 중간 부분의 첫 번째 중간 지지대 축의 레이아웃 다이어그램:
1-참조 스테이크; 2-보조 참조 스테이크; 3센터 강철 로프; 중앙 섹션의 첫 번째 지지대의 축 위치에 해당하는 센터링 강철 로프의 4 표시; 5선 시야; 6개의 파일 드라이빙 페리; 7줄의 익스트림 서포트 파일

쌀. 55. 파일 지지대에 교량을 건설하는 동안 건설 현장 조직 계획: 교량의 1개 준비 섹션; 2-파일 드라이빙 페리; 3-보조 보트; 4-파일 및 노즐; 파일과 노즐의 5개 스택; 잭이 있는 페리 6척; 7대 크레인; 상부구조 블록을 갖춘 8량 차량; 연안 지지대의 하역 요소를 위한 9개 장소; 말뚝박기 페리의 폰툰 블록을 물 위에 하역하기 위한 10개 장소; A – 흐름 방향; B - 페리의 이동 방향

쌀. 79. 계산 번호의 위치


쌀. 8.16. 두 개의 CMS를 사용하여 두 개의 섹션으로 건설하는 동안 교량을 폐쇄하는 계획: 섹션 A와 B의 1 경계; a – 섹션 A와 두 번째 섹션 B의 마지막 지지대를 박는 것; b - 교량 라인에서 섹션 A의 파일 구동 페리 제거, 보트에서 섹션 A의 마지막 지지대 건설, 섹션 B의 마지막 지지대의 파일 구동 c – 파일 드라이빙과 라이닝 폰툰을 서로 가깝게 배치하여 섹션 B의 마지막 지지대를 건설하고, 섹션 B의 파일 드라이빙 구조 페리를 철수하고 건설된 지지대에 경간을 놓는 것입니다.

쌀. 8.17. KMS와 USM을 사용하여 두 구간으로 건설하는 동안 교량을 폐쇄하는 계획: 섹션 A와 B의 1개 경계; a - 섹션 A의 마지막 지지대 설치 및 섹션 B의 마지막 지지대 말뚝 박기 b – 섹션 A의 두 번째 경간의 경간을 놓고 교량 선에서 파일 드라이빙 페리를 제거하고 섹션 B의 마지막 지지대를 건설합니다. c – 섹션 B의 마지막 스팬에 스팬 배치, USM을 사용하여 닫는 스팬에 스팬 배치

쌀. 56. 프레임 지지대에 교량을 건설하는 동안 건설 현장 조직 계획:
1-완성된 교량 부분; 브리지 라인에 잭이 있는 2선 페리; 3대 크레인; 상부구조 블록을 갖춘 4량 차량; 선적 중인 잭이 있는 5개 페리; 6-쉴드 라이닝; 7-세로 대각선 수축; 8개의 노즐과 베드; 9랙; 해안 경간 요소 10개; 물 위에 11개로 조립된 프레임 지지대; 12-로그


쌀. 13.11. PMP 교량의 부유 부분과 고가도로의 인터페이스:
1-해안 PMP 링크; 2-안전 강철 로프; 해안연결 PMP 3개 통로


쌀. 13.12. 바지선으로 만든 부교와 고가도로의 인터페이스:
1-바지; 2-전환 범위; 3단 가대 지지대

쌀. 17.3. 추가 지원을 제공하여 도리 강화:
1-추가 지원; 2페어 웨지

쌀. 13.13. 고가도로와 전환 경간 인터페이스:
1개 고가도로; 2크로스 데크 보드; 3-모기지 목재; 4-지원 채널;
5 도난 방지 코너; 6번의 전환 범위

쌀. 17.2. 나무 다리의 도리 강화:
a – 트랙 블록; b – 개별 통나무(빔)의 접착제; 강화된 교량의 1개 거더;
2트랙 블록; 통나무로 만든 3트랙; 4-브래킷; 5핀

쌀. 17.4. 추가 스탠드를 추가하여 노즐 강화:
1-노즐; 2쌍 웨지; 3-추가 랙; 4다리; 5안감

쌀. 17.5. 추가 프레임을 설치하여 지지대 강화:
1 강화된 지원; 2개의 추가 프레임; 3개의 웨지; 4번 수축

쌀. 14.1. 붐에 통나무 연결:
a - 체인; b – 로프 (와이어)

쌀. 14.2. 강철 로프 붐
그리고 나무 수레:
a – 수레 부착 방식; b- 플로트 디자인; 1-스틸 로프 직경
19-22mm; 2선 12m 길이; 3우드 플로트

쌀. 14.3. 지뢰 방지 순 장벽:
1선 네트워크; 2-플로트; 3-로드

쌀. 14.4. 기울어진 통나무 "슬라임"으로 지지 파일 보호:
1-스트럿; 2경사 통나무 “sliz”; 얼음 속 3개 구멍

쌀. 17.12. 줄무늬 보드를 사용하여 손상된 도리 복원:
1-손상된 도리; 보드 2개, 못 3개

쌀. 17.13. 보드와 못 트러스의 손상된 벽 복원:
1-복원 가능한 트러스 벽; 추가 보드 2개; 3홀 회로

쌀. 17.6. 금속 스팬을 사용한 세로 방향 금속 빔 보강:
1 - 채널의 도리; 2목재 쐐기형 안감
양식; 3 - 노면; 4 - 철근 콘크리트 슬래브;
5 - 강화 된 종 방향 빔; 6 - 크로스빔

쌀. 17.14. Gau-Zhuravsky 유형 트러스의 직선 버팀 가지 복원:
1 - 버팀대의 새로운 가지; 2쌍 웨지; 3볼트; 4-개스킷

쌀. 17.15. Gau-Zhuravsky 유형 트러스 상부 현의 파괴된 가지 복원: 1-삽입; 2쌍 웨지; 3-오버레이; 4볼트; 5-개스킷

쌀. 17.17. 금속 빔의 구부러진 벽 강화:
1-압착; 2 개스킷; 3볼트

쌀. 17.16. 파괴된 파일 복원:
1-새 랙; 2쌍 웨지; 3-새로운 전투; 4패드; 5볼트

쌀. 17.18. 금속 빔의 벽 복원:
1홀 회로; 자동 총을 사용하여 벽을 절단하기 위한 2라인; 3-용접 솔기; 4-오버레이

쌀. 17.7. 크로스빔 보강:
1 - 추가 금속 크로스빔; 2 - 안감; 9 - 강화된 가로빔

쌀. 17.8. 추가 지원으로 메인 트러스(빔) 강화:
a – 추가 지원의 레이아웃 다이어그램; b – 추가 지지대에 대한 트러스 지지 세부 사항; 1-추가 지원; 2-영구 브리지 지원; 3-지원; 4쌍 웨지; 5개의 종방향 지지빔

쌀. 17.9. 유연성을 줄이기 위해 금속 트러스의 버팀대 강화:
1바; 2-볼트; 3중 강화 버팀대
교육 목표: 학생들에게 군사 교량 작업의 일반 단지에서 기계 연구에 대한 책임감을 키우는 것입니다. 학습목표 1. 목적, 분류, 적용 범위 및 성능 특성, 작업 기관의 설계 및 첨부 파일군용 교량 작업의 표준 기계화 수단(간단한 리프팅 장비 및 트럭 크레인). 2. 군 교량 작업의 표준 기계화 수단(간단한 리프팅 장비 및 트럭 크레인) 작업 시 유지 관리 및 수리 시 안전 조치를 준수할 수 있는 능력을 주입합니다.

문헌 1. 교과서 "도로군 예비군 장교의 군사 훈련". 5부 페이지 교과서 "도로 교량 및 공병 장비" 페이지 교과서 "도로군 예비군 장교 군사 훈련" 페이지. 5부 페이지 교과서 “도로교 및 엔지니어링 장비” 페이지

첫 번째 질문 첫 번째 질문 목적, 적용 범위, 목적, 적용 범위, 분류 및 색인화 자동차 크레인의 분류 및 색인화. 자동차 크레인. 두 번째 질문 두 번째 질문 로프 블록 및 유압 구동 장치를 갖춘 크레인의 일반적인 설계 블록 및 유압 구동 장치 세 번째 질문 세 번째 질문 트럭 탑재 크레인의 작동 트럭 탑재 크레인의 작동

첫 번째 질문: 트럭 크레인의 목적, 범위, 분류 및 색인화. 트럭 크레인은 화물을 들어올리고 내리는 데 사용되며, 빈번하고 장거리 이동이 있는 분산된 현장에서 건설, 설치 및 적재 및 하역 작업 중에 수평면에서 짧은 거리로 화물을 이동합니다. 높은 이동성, 기동성, 다용도성 및 최소 배치 및 붕괴 시간을 보유하고 있어 장비 리프팅, 장벽 제거, 파괴된 구조물 잔해 제거, 교량 경간 설치, 조립식 도로 표면 배치 및 공급을 위한 비상 작업에 널리 사용될 수 있습니다. 교량 요소, 제재소 가대에 통나무 놓기, 건설 현장에 도로 및 교량 구조물의 완성된 요소 쌓기, 다양한 자재 적재 및 하역. 높은 이동성, 기동성, 다용도성 및 최소 배치 및 붕괴 시간을 보유하고 있어 장비 리프팅, 장벽 제거, 파괴된 구조물 잔해 제거, 교량 경간 설치, 조립식 도로 표면 배치 및 공급을 위한 비상 작업에 널리 사용될 수 있습니다. 교량 요소, 제재소 가대에 통나무 놓기, 건설 현장에 도로 및 교량 구조물의 완성된 요소 쌓기, 다양한 자재 적재 및 하역. 트럭 크레인은 간헐적 또는 주기적 동작의 리프팅 기계로 분류되며 리프팅 용량, 주요 메커니즘의 구동 유형, 붐 장비의 서스펜션 유형 및 기본 트럭 섀시 유형이 다릅니다. 트럭 크레인은 간헐적 또는 주기적 동작의 리프팅 기계로 분류되며 리프팅 용량, 주요 메커니즘의 구동 유형, 붐 장비의 서스펜션 유형 및 기본 트럭 섀시 유형이 다릅니다.

부하 용량에 따라 부하 용량 범위에 해당하는 크기 그룹으로 나뉩니다: 4; 6.3; 10; 16; 25; 40톤 등. 적재 용량에 따라 적재 용량 범위에 해당하는 크기 그룹으로 나뉩니다: 4; 6.3; 10; 16; 25; 40 t 등. 주요 메커니즘의 구동 유형에 따라 단일 및 다중 모터 개별 드라이브를 갖춘 크레인이 구별됩니다. 단일 엔진 구동 크레인에서는 모든 작업 메커니즘이 하나의 차량 엔진으로 구동되며, 액추에이터로의 움직임 전달은 기계식 변속기(기계식 구동 크레인)를 통해 수행됩니다. 단일 엔진 구동 크레인에서는 모든 작업 메커니즘이 하나의 차량 엔진으로 구동되며, 액추에이터로의 움직임 전달은 기계식 변속기(기계식 구동 크레인)를 통해 수행됩니다. 개별 다중 모터 구동 장치가 있는 크레인에서는 각 메커니즘이 별도의 엔진에 의해 구동됩니다. 이러한 엔진에 동력을 공급하는 에너지원으로는 자동차 엔진과 발전기(전기 구동 크레인) 또는 펌핑(유압 구동 크레인) 스테이션으로 구성된 발전소가 사용됩니다. 개별 다중 모터 구동 장치가 있는 크레인에서는 각 메커니즘이 별도의 엔진에 의해 구동됩니다. 이러한 엔진에 동력을 공급하는 에너지원으로는 자동차 엔진과 발전기(전기 구동 크레인) 또는 펌핑(유압 구동 크레인) 스테이션으로 구성된 발전소가 사용됩니다. 또한 주요 메커니즘의 기계식, 전기식, 유압식 및 혼합 구동 장치를 갖춘 크레인이 있습니다. 또한 주요 메커니즘의 기계식, 전기식, 유압식 및 혼합 구동 장치를 갖춘 크레인이 있습니다. 붐 장비의 서스펜션 유형에 따라 유연하고 견고한 서스펜션을 갖춘 크레인이 구별됩니다. 붐 장비의 서스펜션 유형에 따라 유연하고 견고한 서스펜션을 갖춘 크레인이 구별됩니다. 유연한 서스펜션이 있는 크레인의 경우 붐 장비는 붐의 경사각이 변경되는 로프 시스템으로 고정되고 견고한 서스펜션이 있는 크레인의 경우 유압 실린더로 고정됩니다. 유연한 서스펜션이 있는 크레인의 경우 붐 장비는 붐의 경사각이 변경되는 로프 시스템으로 고정되고 견고한 서스펜션이 있는 크레인의 경우 유압 실린더로 고정됩니다.

크레인의 기반으로 표준 ZIL-130, MAZ-500, KrAZ-255B, KrAZ-257K 차량의 2축 또는 3축 섀시가 사용되며 시골길, 오프로드를 따라 이동하고 작업을 수행할 수 있습니다. 준비되지 않은 사이트의 필드. 섀시는 엔진에서 구동 휠 및 크레인 설치 메커니즘으로 힘을 전달하고 크레인을 이동 및 제어하는 데 필요한 일련의 메커니즘 및 어셈블리입니다. 섀시는 엔진에서 구동 휠 및 크레인 설치 메커니즘으로 힘을 전달하고 크레인을 이동 및 제어하는 데 필요한 일련의 메커니즘 및 어셈블리입니다. 모든 지브 자주식 크레인에는 인덱스가 할당되어 있으며(그림 1), 이는 크레인의 이름을 크게 줄여줍니다. 트럭 크레인의 전체 이름에는 나열된 모든 자격 특성이 포함되어야 합니다. 모든 지브 자주식 크레인에는 인덱스가 할당되어 있으며(그림 1), 이는 크레인의 이름을 크게 줄여줍니다. 트럭 크레인의 전체 이름에는 나열된 모든 자격 특성이 포함되어야 합니다. 또한 모델 번호, 현대화 순서 및 기계의 기후 버전을 표시해야 합니다. 생산된 크레인 러시아 공장, 1967년부터 2개의 문자(KS - 자체 추진 크레인)와 4개의 숫자로 구성된 색인이 지정되었습니다. 또한 모델 번호, 현대화 순서 및 기계의 기후 버전을 표시해야 합니다. 1967년부터 러시아 공장에서 생산된 크레인에는 문자 2개(KS - 자체 추진 크레인)와 숫자 4개로 구성된 색인이 지정되었습니다.

알파벳 부분 뒤에 대시를 통해 쓰여진 숫자 부분은 다음 순서로 크레인에 대한 기본 데이터를 나타냅니다. 첫 번째 숫자는 크기 그룹의 번호 또는 기계의 리프팅 용량, 두 번째 숫자는 유형입니다. 런닝 기어의 세 번째는 붐 장비의 서스펜션 유형이고 네 번째는 크레인 모델의 일련 번호입니다. 알파벳 부분 뒤에 대시를 통해 쓰여진 숫자 부분은 다음 순서로 크레인에 대한 기본 데이터를 나타냅니다. 첫 번째 숫자는 크기 그룹의 번호 또는 기계의 리프팅 용량, 두 번째 숫자는 유형입니다. 런닝 기어의 세 번째는 붐 장비의 서스펜션 유형이고 네 번째는 크레인 모델의 일련 번호입니다. 색인의 숫자 뒤에는 다음 현대화(A, B, C 등)와 크레인의 기후 버전(북쪽 - HL, 열대 - T 또는 습한 열대 - TV)을 나타내는 문자가 있을 수 있습니다. 색인의 숫자 뒤에는 다음 현대화(A, B, C 등)와 크레인의 기후 버전(북쪽 - HL, 열대 - T 또는 습한 열대 - TV)을 나타내는 문자가 있을 수 있습니다. 예. 크레인 브랜드 KS-3562 AHL은 다음을 의미합니다. KS - 자체 추진 지브 롤; 3 - 세 번째 크기 그룹(적재 용량 - 10톤); 5 - 차량 섀시를 포함한 작동 장치; 6 - 붐 장비의 유연한 서스펜션; 2 - 크레인 모델의 일련번호 A - 최초의 현대화; HL - 북부 버전.

쌀. 1. 지브 자주식 크레인의 인덱싱 범용 KS - 범용 자주식 지브 크레인; HL - 북부 버전; T - 열대 지방; TV - 열대 지방은 습합니다. G - 최소 허용 트랙 표면을 갖춘 캐터필라 차대; GU - 트랙 표면이 증가한 것과 동일합니다. P - 공압 휠 구동 장치; Ш - 특수 자동차형 섀시; Av - 트럭 섀시; Tr - 트랙터; Pr - 트레일링 러닝 기어


도로 작업에서는 리프팅 용량이 6.3, 10, 16톤인 전기 및 유압 구동 장치를 갖춘 트럭 크레인이 널리 사용됩니다. 두 가지 유형의 드라이브 모두 표준화된 장치를 사용할 수 있는 가능성을 제공하여 크레인의 작동 능력을 향상시킵니다. 메커니즘의 레이아웃이 더욱 편리해지고 작업 조건이 개선되며 작업 수행 정확도가 향상되고 기계의 신뢰성과 내구성이 향상됩니다. 두 가지 유형의 드라이브 모두 표준화된 장치를 사용할 수 있는 가능성을 제공하여 크레인의 작동 능력을 향상시키고 메커니즘의 레이아웃을 더욱 편리하게 하며 작업 조건을 개선하고 작업 작동의 정확성을 높이며 기계의 신뢰성과 내구성을 높입니다. 전기 유압 드라이브와 비교하여, 운동학적으로 복잡한 장치를 사용하지 않고도 에너지원에서 크레인의 작동 부품 또는 작동 부품까지 더 큰 기어비를 얻을 수 있습니다. 전기 유압 드라이브와 비교하여, 운동학적으로 복잡한 장치를 사용하지 않고도 에너지원에서 크레인의 작동 부품 또는 작동 부품까지 더 큰 기어비를 얻을 수 있습니다. 동시에, 유압 드라이브는 상대적으로 신뢰성이 낮고 더 많은 작업이 필요합니다. 유지. 동시에, 유압 드라이브는 상대적으로 신뢰성이 낮고 더 많은 유지 관리 작업이 필요합니다.

자동차 크레인에 대한 여러 새로운 기술 요구 사항의 출현으로 유압 드라이브의 광범위한 사용이 촉진되었습니다. 자동차 크레인에 대한 여러 가지 새로운 기술 요구 사항의 출현으로 유압 드라이브의 광범위한 사용이 촉진되었습니다. - 시간 단축 작업 장비를 운송 위치에서 작업 위치로 또는 그 반대로 이동하는 동안 손실되었습니다. - 작업 장비를 운송 위치에서 작업 위치로 또는 그 반대로 이동하는 데 소요되는 시간 손실을 줄입니다. - 비좁은 작업 조건(밀폐된 공간, 복잡한 구성의 소규모 작업장)에서 크레인 사용 - 비좁은 작업 조건(밀폐된 공간, 복잡한 구성의 소규모 작업장)에서 크레인 사용 - 문과 창문 개구부를 통해 화물을 공급할 때를 포함하여 작업 장비 및 화물 설치의 정확성을 높입니다. - 제작 지원 설치작업부하에 관계없이 작업 동작의 속도 제어에 필요한 범위와 정밀도.

수평 하중 전달 범위를 결정하는 트럭 크레인의 주요 매개변수: - 붐 반경 L(m) - 크레인 회전 부분의 회전축(그림 2)에서 후크 링크 C 중심까지의 거리 - 팁 리브 A로부터의 도달 거리(m) - 팁 리브에서 후크 링크 중심까지의 수평 거리 A1(아우트리거 없이 작업하는 경우) 또는 A2(아웃트리거에서) - 리프팅 용량 Q(t) - 주어진 붐 반경에 대한 최대 허용 하중의 질량. 트럭 크레인의 리프팅 용량은 후크의 도달 범위에 따라 다릅니다. 크레인의 리프팅 용량은 도달 거리 L에 따라 달라집니다. 이러한 종속성을 부하 특성이라고 합니다. 크레인의 리프팅 용량은 도달 거리 L에 따라 달라집니다. 이러한 종속성을 부하 특성이라고 합니다. 가장 작은 후크 도달 거리에서 크레인의 리프팅 용량은 최대 후크 도달 범위보다 몇 배 더 큽니다. 가장 작은 후크 도달 거리에서 크레인의 리프팅 용량은 최대 후크 도달 범위보다 몇 배 더 큽니다. 화물 취급 장치로 작업할 때 해당 장치의 질량은 주어진 붐 도달 범위에 대한 일정에 따라 결정된 최대 허용 하중 질량에 포함됩니다. 화물 취급 장치로 작업할 때 해당 장치의 질량은 주어진 붐 도달 범위에 대한 일정에 따라 결정된 최대 허용 하중 질량에 포함됩니다.

자동차 붐의 주요 매개변수 크레인 O-O- 회전 부분의 회전축; O 1 -O 1 및 O 2 -O 2 - 각각 아우트리거 없이 작동할 때와 아우트리거에서 작동할 때 크레인 티핑 리브의 일반적인 위치입니다. Q - 부하 용량; G - 작업 질량; H - 후크 리프팅 높이; h - 후크 하강 깊이; B0 - 아우트리거의 가로 베이스; A 1 - 아우트리거 없이 작업할 때 기울어지는 리브에서 도달합니다. A 2 - 아웃트리거 작업 시 팁 립에서 도달합니다. L - 붐 반경

화물을 수직으로 이동할 가능성을 결정하는 매개변수: - 후크 하강 깊이 h(m) - 크레인 주차 수준에서 하단 작업 위치에 있는 후크 입구 중심까지의 거리 - 후크 리프팅 높이 N(m) - 크레인 주차 수준에서 상단(가장 높은) 작업 위치에 있는 후크 입구 중심까지의 거리입니다. L 매개변수는 크레인이 하중을 수평으로 이동시키는 능력을 결정하고, H 및 h 매개변수는 수직으로 이동하는 능력을 결정합니다. 아우트리거 작업 시 매개변수 A2의 값은 B 값(작동 위치에 있을 때 인접한 두 아우트리거의 지지 요소 중간점을 통과하는 수직 축 사이의 거리)에 따라 달라집니다. A2=L-0.5B. 이 거리를 아우트리거의 가로 B1 또는 세로 B2 베이스라고 합니다.

크레인의 회전 부분이 회전하면 붐 장비가 특정 구역의 기계 섀시를 기준으로 이동하여 작업 영역을 형성합니다. 아우트리거의 지지점을 통해 원이 그려지면 크레인이 하중을 들어올리고 이동하고 낮출 수 있는 작업 영역에 링이 형성됩니다. 이 영역을 사용 가능한 작업 영역이라고 합니다. 붐 장비의 두 극단 위치에 해당하는 중심각 β를 크레인 작업 영역이라고 합니다. 크레인이 섀시를 기준으로 붐 장비의 어느 위치에서나 작동할 수 있는 경우 크레인의 작동 영역은 β = 360°입니다. 크레인이 섀시를 기준으로 붐 장비의 어느 위치에서나 작동할 수 있는 경우 크레인의 작동 영역은 β = 360°입니다.

크레인 KS 스탠드; 2 - 붐; 3 - 오일 탱크; 4 - 스페어 휠; 5 - 회전 플랫폼; 6 - 신발; 7 - 회전 지지대; 8 - 섀시; 9 - 아우트리거; 10 - 잠금 메커니즘; 11 - 프레임; 12 - 직면; 13 - 지브 크레인 KS 스탠드; 2 - 붐; 3 - 오일 탱크; 4 - 스페어 휠; 5 - 회전 플랫폼; 6 - 신발; 7 - 회전 지지대; 8 - 섀시; 9 - 아우트리거; 10 - 잠금 메커니즘; 11 - 프레임; 12 - 직면; 13 - 분필

KS-3572 트럭 크레인은 고정 부분과 회전 부분으로 구성되어 있으며 선회 지지 장치 7로 상호 연결되어 크레인의 회전 부분에서 고정 부분으로 하중(하중 모멘트, 수직 및 수평 힘)을 전달하고 다음을 제공합니다. 고정된 부분을 기준으로 회전 부분을 회전시키는 기능. 크레인의 회전하지 않는 부분은 주행 기어와 아웃리거(9)가 장착된 섀시(8)입니다. 주행 기어는 KrAZ-255B 트럭의 섀시입니다. 크레인 설치의 메커니즘과 구성 요소를 배치해야 하기 때문에 차량 섀시의 설계가 많이 변경되었습니다. 차체 대신 주행 프레임이 차량 프레임에 고정되고 동력 장치가 고정됩니다. 오프 박스, 중간 기어 박스, 붐 지지 포스트 1 및 안정 장치 또는 탄성 서스펜션 스위치가 추가로 설치됩니다. 잠금 장치 10. 유압 구동 크레인의 경우 추가 오일 탱크 3이 설치됩니다. 필요한 경우 연료 위치를 변경하십시오. 탱크와 스페어 휠. 크레인 설치의 메커니즘과 구성 요소를 배치해야 하기 때문에 차량 섀시의 설계가 많이 변경되었습니다. 차체 대신 주행 프레임이 차량 프레임에 고정되고 동력 장치가 고정됩니다. 오프 박스, 중간 기어 박스, 붐 지지 포스트 1 및 안정 장치 또는 탄성 서스펜션 스위치가 추가로 설치됩니다. 잠금 장치 10. 유압 구동 크레인의 경우 추가 오일 탱크 3이 설치됩니다. 필요한 경우 연료 위치를 변경하십시오. 탱크와 스페어 휠.

KS 크레인의 섀시는 공간 용접 구조로 차량 섀시에 장착되고 선회 베어링이 설치됩니다. 런닝 프레임은 차량 섀시나 아웃리거를 통해 회전 부분에서 베이스로 하중을 전달합니다. 두 개의 구동축이 있습니다. 두 차축 모두 주차 브레이크가 장착되어 있습니다. 앞 차축의 주차 브레이크는 공압식이고 뒷차축의 주차 브레이크는 공압식 및 유압식으로 제어됩니다. 런닝 프레임은 차량 섀시나 아웃리거를 통해 회전 부분에서 베이스로 하중을 전달합니다. 두 개의 구동축이 있습니다. 두 차축 모두 주차 브레이크가 장착되어 있습니다. 앞 차축의 주차 브레이크는 공압식이고 뒷차축의 주차 브레이크는 공압식 및 유압식으로 제어됩니다. 크레인을 견인할 때 휠 브레이크와 주차 브레이크는 모두 트랙터의 공압 구동 장치를 통해 제어됩니다. 각 구동축에는 하중 지지력이 향상된 타이어가 장착된 이중 바퀴가 있어 아우트리거 없이 작업할 때 크레인의 리프팅 용량을 14톤까지 늘릴 수 있습니다. 크레인을 견인할 때 휠 브레이크와 주차 브레이크는 모두 트랙터의 공압 구동 장치를 통해 제어됩니다. 각 구동축에는 하중 지지력이 향상된 타이어가 장착된 이중 바퀴가 있어 아우트리거 없이 작업할 때 크레인의 리프팅 용량을 14톤까지 늘릴 수 있습니다. 크레인의 회전 부분은 액추에이터, 운전실 및 붐 장비가 위치한 회전 플랫폼입니다.

회전 플랫폼(5)은 회전 지지 장치(7)에 설치된 회전 프레임(크레인 회전 부분의 베이스)이다. 회전 프레임 끝에는 작동 중에 크레인의 균형을 잡아주는 평형추(추가 중량)가 있다. 크레인의 액추에이터와 드라이브는 케이싱(후드)에 의해 외부 영향으로부터 보호됩니다. 붐 장비를 유연하게 매달 수 있는 크레인의 경우 붐 장비가 매달리는 회전 플랫폼에 2개의 다리가 있는 스탠드가 설치됩니다. 액추에이터. 붐 장비를 유연하게 서스펜션하는 크레인의 경우 액추에이터에는 붐 윈치 - 붐 각도 변경용, 화물 윈치 - 하중 상승 및 하강용, 회전 메커니즘 - 크레인의 회전 부분 회전용이 포함됩니다. 윈치와 회전 메커니즘의 움직임은 반전 분배 메커니즘에서 전달됩니다. 붐 장비의 고정식 서스펜션이 있는 크레인의 경우 텔레스코픽 붐의 경사각은 유압 실린더(유압 실린더)를 사용하여 변경됩니다. 화물의 승강(하강)은 화물 윈치에 의해 이루어지며, 회전부의 회전은 회전 기구에 의해 이루어진다. 윈치와 회전 메커니즘의 움직임은 유압 모터에서 전달됩니다. 윈치와 회전 메커니즘의 움직임은 반전 분배 메커니즘에서 전달됩니다. 붐 장비의 고정식 서스펜션이 있는 크레인의 경우 텔레스코픽 붐의 경사각은 유압 실린더(유압 실린더)를 사용하여 변경됩니다. 화물의 승강(하강)은 화물 윈치에 의해 이루어지며, 회전부의 회전은 회전 기구에 의해 이루어진다. 윈치와 회전 메커니즘의 움직임은 유압 모터에서 전달됩니다. 접이식 및 텔레스코픽 크레인 붐에는 확장을 위한 특수 메커니즘이 장착되어 있습니다. 접이식 및 텔레스코픽 크레인 붐에는 확장을 위한 특수 메커니즘이 장착되어 있습니다.

크레인 제어 장치와 운전석이 있는 캐빈에는 필요한 표시기, 경보 시스템 및 미기후(난방, 환기) 생성을 위한 시스템 및 조명이 장착되어 있습니다. 객실 바닥은 유전체로 덮여 있습니다. KS-4561A 크레인 회전 플랫폼의 오른쪽 및 왼쪽 발코니에는 변압기, 명령 컨트롤러, 저항 상자 및 전원 캐비닛이 있습니다. 붐 장비는 크레인 작업 영역에서 화물 취급 장치의 작동을 보장합니다. 붐 장비는 크레인 작업 영역에서 화물 취급 장치의 작동을 보장합니다. 유연한 서스펜션이 있는 크레인의 경우 붐 장비에는 짐과 붐을 들어올리기 위한 지브, 화물 및 붐 풀리가 있거나 없는 메인 및 확장형 비복귀형(KS-4561) 및 접이식(KS-2563) 붐과 특수 붐이 장착되어 있습니다. 붐이 기울어지는 것을 방지하는 로프 장치. 유연한 서스펜션이 있는 크레인의 경우 붐 장비에는 짐과 붐을 들어올리기 위한 지브, 화물 및 붐 풀리가 있거나 없는 메인 및 확장형 비복귀형(KS-4561) 및 접이식(KS-2563) 붐과 특수 붐이 장착되어 있습니다. 붐이 기울어지는 것을 방지하는 로프 장치.

붐 풀리는 2족 기둥의 헤드 부분과 붐 헤드에 가이 로프로 연결된 특수 대들보에 설치된 블록과 2족 기둥의 블록과 대들보를 둘러싸는 붐 로프로 구성됩니다. 고정식 서스펜션이 있는 크레인의 경우 붐 장비는 지브가 있거나 없는 텔레스코픽 붐과 붐을 들어올리고 섹션을 확장하기 위한 유압 실린더로 구성됩니다. 두 가지 유형의 크레인의 붐 장비에는 후크 서스펜션을 사용하여 트럭 탑재 크레인에 사용되는 화물 처리 장치와 그랩 버킷 및 자석 와셔가 포함됩니다. 차량의 스프링을 내리고 안정성을 높이기 위해 차량 크레인에는 서스펜션 스위치 또는 안정 장치가 장착되어 있습니다. 차량의 스프링을 내리고 안정성을 높이기 위해 차량 크레인에는 서스펜션 스위치 또는 안정 장치가 장착되어 있습니다.

후크 서스펜션은 블록, 트래버스 및 화물 후크로 구성됩니다. 후크 서스펜션 블록은 붐 헤드 블록 및 화물 로프와 함께 화물 풀리를 형성합니다. 쌀. 4. 크레인 KS-3562A 및 KS 유압 실린더용 로터리 아웃트리거 지지대; 2 - 빔; 3 - 핀; 4 - 봄; 5 - 와셔; 6 - 축; 7 - 반지; 8 - 오일러 아웃리거(그림 4)는 작동 중인 프레임에 장착된 장치이며 작동 조건에서 크레인의 지지 윤곽을 늘리는 데 사용됩니다. 크레인에는 안전한 작동을 보장하는 장치 및 장비 시스템(부하 제한기, 위험 전압 경보, 후크 이동 제한기, 붐)이 장착되어 있습니다.

케이블 블록 및 유압 드라이브를 갖춘 크레인의 일반 설계 전기 드라이브를 갖춘 자동차 크레인 400V 전압의 동기 발전기는 크레인 메커니즘의 전기 모터에 전력을 공급하는 전기 공급원으로 사용됩니다.KS-4561A 크레인에서는 동기식 30kW 출력의 발전기는 트랜스퍼 케이스 하우징에 설치된 이륙 상자 전원과 구동축을 통해 차량 엔진에 의해 구동됩니다. KS-2563 크레인에서는 주행 프레임 브래킷의 특수 플레이트에 설치된 kW 출력의 동기식 발전기가 V 벨트 드라이브를 통해 동력인출장치에서 회전 구동됩니다.

공압식 바퀴가 달린 KS-5363 지브 자주식 크레인은 자체 220V DC 발전기로 구동되는 개별 전기 구동 장치를 갖추고 있습니다. 발전기(주 50kW 및 보조 16kW)는 YaAZ-M240B 디젤 엔진 또는 비동기 모터로 구동됩니다. 외부 네트워크에 연결되어 있는 것 교류전압 380V. KS-5363 크레인에는 주 및 보조 리프팅 윈치, 지브 윈치, 선회 메커니즘 및 이동 메커니즘이 장착되어 있습니다. KS-5363 크레인에는 메인 및 보조 리프팅 윈치, 지브 윈치, 선회 메커니즘 및 이동 메커니즘이 장착되어 있습니다. 크레인 발전기는 기본 차량 섀시 엔진의 기계적 에너지를 전기 에너지로 변환합니다. 크레인의 주행 프레임에 위치한 전원 캐비닛에 전류가 공급된 다음 집전체(집전체)를 통해 회전 프레임에 전류가 공급됩니다. 크레인 발전기는 기본 차량 섀시 엔진의 기계적 에너지를 전기 에너지로 변환합니다. 크레인의 주행 프레임에 위치한 전원 캐비닛에 전류가 공급된 다음 집전체(집전체)를 통해 회전 프레임에 전류가 공급됩니다. 그런 다음 제어판과 시동 장치를 통해 전류가 액추에이터의 전기 모터로 직접 흐릅니다. 그런 다음 제어판과 시동 장치를 통해 전류가 액추에이터의 전기 모터로 직접 흐릅니다. KS-5363 크레인 선회 메커니즘의 전기 모터는 보조 발전기로부터 전력을 공급받고 추가 컨트롤러를 사용하여 제어되므로 이 메커니즘의 작동이 주 발전기에서 작동하는 크레인 메커니즘 중 하나의 작동과 결합될 수 있습니다. KS-5363 크레인 선회 메커니즘의 전기 모터는 보조 발전기로부터 전력을 공급받고 추가 컨트롤러를 사용하여 제어되므로 이 메커니즘의 작동이 주 발전기에서 작동하는 크레인 메커니즘 중 하나의 작동과 결합될 수 있습니다.

유압 구동 장치를 갖춘 자동차 크레인. 유압 구동 장치를 갖춘 자동차 크레인. 자동차 크레인의 유압 드라이브는 파이프라인 시스템을 통해 이동하는 작동 유체를 통해 유압 펌프와 유압 모터 사이에 유체 비압축성 한계 내에서 견고한 연결을 제공합니다. 모든 자동차 크레인은 작동 유체의 에너지원으로 축 피스톤 유압 펌프를 사용합니다. 모든 자동차 크레인은 작동 유체의 에너지원으로 축 피스톤 유압 펌프를 사용합니다. 크레인의 유압 구동은 1개(KS-3572) 또는 2개의 유압 펌프(KS-4571)로 수행됩니다. 작동유체이는 회전 조인트를 통해 파이프라인을 통해 크레인의 회전 부분으로 흐른 다음 액추에이터의 유압 모터로 흐릅니다. 크레인의 유압 구동은 1개(KS-3572) 또는 2개의 유압 펌프(KS-4571)로 수행됩니다. 작동 유체는 회전 조인트를 통해 파이프라인을 통해 크레인의 회전 부분으로 흐른 다음 액추에이터의 유압 모터로 흐릅니다. KS-4571 크레인에서는 유압 펌프가 동력인출장치에서 회전 구동됩니다. 첫 번째 펌프에서 양방향 크레인 장치를 사용하는 작동 유체의 흐름은 아웃리거의 유압 실린더와 후방 보기의 서스펜션 잠금 장치 또는 붐의 유압 실린더 또는 스윙 메커니즘. 두 번째 펌프에서 작동 유체의 흐름(분배기를 통해)은 화물 윈치의 유압 모터 또는 붐 섹션을 확장하기 위한 유압 실린더로 향합니다. 빈 후크를 들어 올리는(내리는) 속도를 높이려면 작동 유체의 흐름을 화물 윈치의 유압 모터에 결합하는 것이 가능합니다. KS-4571 크레인에서는 유압 펌프가 동력인출장치에서 회전 구동됩니다. 첫 번째 펌프에서 양방향 크레인 장치를 사용하는 작동 유체의 흐름은 아웃리거의 유압 실린더와 후방 보기의 서스펜션 잠금 장치 또는 붐의 유압 실린더 또는 스윙 메커니즘. 두 번째 펌프에서 작동 유체의 흐름(분배기를 통해)은 화물 윈치의 유압 모터 또는 붐 섹션을 확장하기 위한 유압 실린더로 향합니다. 빈 후크를 들어 올리는(내리는) 속도를 높이려면 작동 유체의 흐름을 화물 윈치의 유압 모터에 결합하는 것이 가능합니다. 다양한 장비가 작동 유체의 흐름에 연결되어 엔진을 시동 및 정지하고 필요한 작동 모드를 설정하며 모든 구동 장치의 작동을 제어합니다. 다양한 장비가 작동 유체의 흐름에 연결되어 엔진을 시동 및 정지하고 필요한 작동 모드를 설정하며 모든 구동 장치의 작동을 제어합니다.

발전기 및 유압 펌프의 구동 메커니즘 기계 또는 메커니즘을 구동(이동)하려면 드라이브라고 하는 일련의 장치가 사용됩니다. 트럭 크레인의 구동은 전력 장비, 변속기 및 제어 시스템으로 구성됩니다. 전력 장비는 에너지 원이며 하나 또는 다른 유형의 에너지를 기계 에너지로 변환하는 장치 시스템입니다. 베이스카의 동력장치(내연기관)는 자동차 크레인 구동용 동력장치로 사용됩니다.

펌핑 장치는 동력인출 장치를 통해 기본 차량의 엔진에서 구동되어 전달된 기계적 에너지를 작동 유체 흐름의 에너지로 변환합니다. 작동 유체는 회전 조인트를 통해 파이프라인을 통해 크레인의 회전 부분으로 흐른 다음 액추에이터의 유압 모터로 흐릅니다. 이러한 유형의 구동을 개별 유압 구동을 갖춘 다중 모터라고 합니다. 유압 드라이브를 사용하면 작업 이동 속도를 원활하게 조절할 수 있습니다. 유압 구동식 크레인을 작동하는 데는 많은 육체적 노력이 필요하지 않습니다. 액추에이터가 있는 제어판은 크레인 운전실에 있으며 지지대 확장 및 설치를 위한 제어 장치는 고정 프레임에 있습니다. 액추에이터가 있는 제어판은 크레인 운전실에 있으며 지지대 확장 및 설치를 위한 제어 장치는 고정 프레임에 있습니다. 객실에는 필요한 표지판, 경보 시스템, 환기 및 난방 시설이 갖추어져 있습니다. 객실에는 필요한 표지판, 경보 시스템, 환기 및 난방 시설이 갖추어져 있습니다. 변속기는 결과적인 기계적 에너지(모션)를 최종 요소(하중 처리 장치를 작동하고, 크레인의 붐 장비를 낮추거나 올리고, 회전 부품을 회전시키고, 기계를 이동시키는 액추에이터)에 전달합니다.

기본 섀시의 변속기에는 전기 및 유압 드라이브를 통해 엔진에서 크레인 메커니즘으로 토크를 전달하는 동력인출 장치가 포함되어 있습니다. 설치 방법에 따라 동력인출장치는 두 가지 유형이 있습니다. 설치 방법에 따라 동력인출장치는 두 가지 유형이 있습니다. 첫 번째 유형의 상자는 기어박스의 구동축과 후방 차축 기어박스 샤프트에 대한 중간 지지대 대신 기본 차량의 변속기에 내장되며 특별히 단축된 구동축으로 연결됩니다. 이러한 상자는 이동 시 발전기(유압 펌프) 또는 구동 휠에 동력을 전달합니다. 첫 번째 유형의 상자는 기어박스의 구동축과 후방 차축 기어박스 샤프트에 대한 중간 지지대 대신 기본 차량의 변속기에 내장되며 특별히 단축된 구동축으로 연결됩니다. 이러한 상자는 이동 시 발전기(유압 펌프) 또는 구동 휠에 동력을 전달합니다. 두 번째 유형의 상자는 KS-3571 크레인 섀시의 기어 박스 또는 KS-3572, KS-4561A 크레인 섀시의 트랜스퍼 케이스에 설치됩니다. KS-2563 크레인의 동력인출장치 박스 하우징은 샤시 프레임 브래킷에 장착됩니다. 두 번째 유형의 상자는 KS-3571 크레인 섀시의 기어 박스 또는 KS-3572, KS-4561A 크레인 섀시의 트랜스퍼 케이스에 설치됩니다. KS-2563 크레인의 동력인출장치 박스 하우징은 샤시 프레임 브래킷에 장착됩니다.

KS-3572, KS-4561 크레인의 동력인출 장치는 카르단 샤프트를 통해 KS-4561 크레인 발전기의 로터 또는 KS 크레인 펌프 드라이브에 회전을 전달하도록 설계되었습니다. 펌프 드라이브는 카르단 샤프트로 구성됩니다. 그리고 펌프 설치. KS-5363 공압 휠 크레인의 DK-309B 발전기 구동은 외부 네트워크에서 작동할 때 디젤 엔진을 자동으로 끄는 원심 클러치를 사용하며, 다음과 같은 경우에만 원활하게 켜지므로 디젤 엔진의 시동이 용이합니다. 디젤 엔진이 rpm에 도달합니다. 제어 시스템의 도움으로 액추에이터가 시작 및 중지되고 필요한 작동 모드가 설정될 뿐만 아니라 모든 구동 장치의 작동이 모니터링 및 조정됩니다. 400V 전압의 동기식 발전기는 크레인 메커니즘의 전기 모터에 전력을 공급하는 전원으로 사용됩니다.KS-4561A 크레인에서는 30kW 전력의 동기식 발전기가 동력을 통해 차량 엔진에 의해 구동됩니다. 트랜스퍼 케이스 하우징과 구동축에 장착된 이륙 장치.

KS-2563 크레인에서는 특수 플레이트(실행 프레임의 브래킷)에 설치된 kW 출력의 동기식 발전기가 V 벨트 드라이브를 통해 동력인출장치에서 회전하도록 구동됩니다. 상자의 움직임은 기본 자동차 엔진에서 클러치, 기어박스 및 구동축을 통해 전달됩니다. 공압 바퀴가 달린 KS-5363 지브 자체 추진 크레인에는 자체 220V DC 발전기로 구동되는 메커니즘을 위한 개별 전기 드라이브가 있습니다. 발전기(주 - 50kW 및 보조 - 16kW)는 YAZ-M240B 디젤 엔진으로 구동됩니다. 380V 전압으로 외부 AC 네트워크에 연결된 비동기 모터. KS-5363 크레인에는 주 및 보조 리프팅 윈치, 붐 윈치, 회전 메커니즘 및 이동 메커니즘이 장착되어 있습니다. 크레인 발전기는 기본 엔진의 기계적 에너지를 전기 에너지로 변환합니다. 전기크레인의 주행 프레임에 있는 전원 캐비닛에 공급된 다음 전류 수집기(전류 수집기)를 통해 회전 프레임에 공급됩니다. 그런 다음 제어판과 시동 장치를 통해 전류가 액추에이터의 전기 모터로 직접 흐릅니다. KS-5363 크레인 선회 메커니즘의 전기 모터는 보조 발전기로부터 전력을 공급받고 추가 컨트롤러를 사용하여 제어되므로 이 메커니즘의 작동이 주 발전기에서 작동하는 크레인 메커니즘 중 하나의 작동과 결합될 수 있습니다.

세 번째 질문 자동차 크레인의 작동 KS-2563 크레인에서는 특수 플레이트(실행 프레임의 브래킷)에 설치된 kW 출력의 동기식 발전기가 동력인출장치에서 다음을 통해 회전하도록 구동됩니다. V-벨트 드라이브. 상자의 움직임은 기본 자동차 엔진에서 클러치, 기어박스 및 구동축을 통해 전달됩니다. 공압 바퀴가 달린 KS-5363 지브 자체 추진 크레인에는 자체 220V DC 발전기로 구동되는 메커니즘을 위한 개별 전기 드라이브가 있습니다. 발전기(주 - 50kW 및 보조 - 16kW)는 YAZ-M240B 디젤 엔진으로 구동됩니다. 380V 전압으로 외부 AC 네트워크에 연결된 비동기 모터. KS-5363 크레인에는 주 및 보조 리프팅 윈치, 붐 윈치, 회전 메커니즘 및 이동 메커니즘이 장착되어 있습니다.

크레인 발전기는 기본 엔진의 기계적 에너지를 전기 에너지로 변환합니다. 전류는 크레인의 주행 프레임에 있는 전원 캐비닛에 공급된 다음 전류 수집기(전류 수집기)를 통해 회전 프레임에 공급됩니다. 그런 다음 제어판과 시동 장치를 통해 전류가 액추에이터의 전기 모터로 직접 흐릅니다. KS-5363 크레인 선회 메커니즘의 전기 모터는 보조 발전기로부터 전력을 공급받고 추가 컨트롤러를 사용하여 제어되므로 이 메커니즘의 작동이 주 발전기에서 작동하는 크레인 메커니즘 중 하나의 작동과 결합될 수 있습니다.

구동 제어 장비는 두 그룹으로 나뉩니다. - 주 에너지 흐름 회로에 직접 연결된 장치 및 기계 장치, 즉 구동 제어 장비 자체 - 첫 번째 그룹의 장치 및 장치를 제어하는 장치 및 기계 장치. 이는 드라이브 제어 시스템의 일부이므로 제어 시스템 장비라고도 합니다. 이는 드라이브 제어 시스템의 일부이므로 제어 시스템 장비라고도 합니다. 기계식 드라이브가 장착된 크레인(KS-2561D, KS-3561A)에서는 메커니즘 제어가 크레인 운전실에 집중되어 있으며, 여기에는 마찰 클러치 제어용 레버 4개, 브레이크 제어용 페달 4개, 클러치 제어용 페달 1개가 있습니다. 설치되었습니다. 또한 운전실 측벽의 크레인 운전자 오른쪽에는 일반 중앙 후진을위한 제어 레버, 엔진 실린더에 연료 공급을위한 제어 레버 및 크레인 메커니즘의 폴을 제어하는 핸들이 있습니다. 붐 호이스트 윈치. 기계식 드라이브가 장착된 크레인(KS-2561D, KS-3561A)에서는 메커니즘 제어가 크레인 운전실에 집중되어 있으며, 여기에는 마찰 클러치 제어용 레버 4개, 브레이크 제어용 페달 4개, 클러치 제어용 페달 1개가 있습니다. 설치되었습니다. 또한 운전실 측벽의 크레인 운전자 오른쪽에는 일반 중앙 후진을위한 제어 레버, 엔진 실린더에 연료 공급을위한 제어 레버 및 크레인 메커니즘의 폴을 제어하는 핸들이 있습니다. 붐 호이스트 윈치. 전기 구동 장치가 있는 크레인(KS-4362, KS-5363, KS-6362, KS-7362, KS-8362)을 작동할 때 크레인 운전자는 상당한 육체적 노력을 가할 필요가 없습니다. 크레인 제어는 간단하고 안정적입니다. 그러나 이러한 크레인의 전기 장비가 복잡하기 때문에 트럭 크레인 운전자의 자격이 요구됩니다. 전기 구동 장치가 있는 크레인(KS-4362, KS-5363, KS-6362, KS-7362, KS-8362)을 작동할 때 크레인 운전자는 상당한 육체적 노력을 가할 필요가 없습니다. 크레인 제어는 간단하고 안정적입니다. 그러나 이러한 크레인의 전기 장비가 복잡하기 때문에 트럭 크레인 운전자의 자격이 요구됩니다. 크레인 메커니즘의 전기 모터는 제어 시스템과 보호 장비를 사용하여 제어됩니다. 크레인 메커니즘의 전기 모터는 제어 시스템과 보호 장비를 사용하여 제어됩니다.

제어 시스템은 스위칭 및 제어 장비로 구성됩니다. 스위칭 장비에는 스위치, 접점, 패키지 스위치가 포함됩니다. 스위칭 장비에는 스위치, 접점, 패키지 스위치가 포함됩니다. 제어 장치에는 전기 모터의 시동, 후진, 속도 변경 및 정지에 사용되는 캠 및 드럼 유형 컨트롤러가 포함됩니다. 제어 장치에는 전기 모터의 시동, 후진, 속도 변경 및 정지에 사용되는 캠 및 드럼 유형 컨트롤러가 포함됩니다. 보호 장비에는 퓨즈, 안정기, 회로 차단기 및 과전류 계전기가 포함됩니다. 보호 장비에는 퓨즈, 안정기, 회로 차단기 및 과전류 계전기가 포함됩니다. 제어 시스템 장비, 안전 장비 및 계측기는 트럭 크레인 운전실에 장착됩니다. 제어 시스템 장비, 안전 장비 및 계측기는 트럭 크레인 운전실에 장착됩니다. 유압 드라이브가 장착된 크레인(KS-2561, KS-3562A, KS-4561A, KS-4571)을 제어하는 데는 기계식 드라이브가 장착된 크레인처럼 더 큰 물리적 노력이 필요하지 않으며 전기 드라이브가 장착된 크레인보다 훨씬 간단합니다. 유압 드라이브가 장착된 크레인(KS-2561, KS-3562A, KS-4561A, KS-4571)을 제어하는 데는 기계식 드라이브가 장착된 크레인처럼 더 큰 물리적 노력이 필요하지 않으며 전기 드라이브가 장착된 크레인보다 훨씬 간단합니다. 이 크레인 그룹에서는 붐 리프트, 로드 리프트, 플랫폼 회전, 아우트리거 및 안정 장치용 액추에이터가 유압식으로 작동됩니다. 이 크레인 그룹에서는 붐 리프트, 로드 리프트, 플랫폼 회전, 아우트리거 및 안정 장치용 액추에이터가 유압식으로 작동됩니다. 액추에이터용 제어판은 크레인 운전실에 있으며 지지대 확장 및 설치를 위한 제어 장치는 고정 프레임에 있습니다. 액추에이터용 제어판은 크레인 운전실에 있으며 지지대 확장 및 설치를 위한 제어 장치는 고정 프레임에 있습니다.

주제 1. 군도로 교량 일반정보 제1과. 군도로 교량 일반정보
 교육 목표: 얻은 지식을 습득하는 데 대한 책임감을 키우는 것입니다. 교육 목표: 1. 군사 작전을 위한 도로 지원에서 교량의 역할과 중요성을 밝힙니다. 2. 주요 고속도로의 인공 구조물 유형, 군용 교량의 분류 및 주요 요소를 학생들과 함께 연구합니다.
교육 목표: 얻은 지식을 습득하는 데 대한 책임감을 키우는 것입니다. 교육 목표: 1. 군사 작전을 위한 도로 지원에서 교량의 역할과 중요성을 밝힙니다. 2. 주요 고속도로의 인공 구조물 유형, 군용 교량의 분류 및 주요 요소를 학생들과 함께 연구합니다.
 첫 번째 질문입니다. 도로군 예비군 장교 훈련에서 규율의 위치와 목적. 규율의 내용과 목표. 두 번째 질문입니다. 운영을 위한 도로 지원에서 교량의 역할과 중요성. 군 교량 건설에 대한 간략한 역사적 개요 세 번째 질문입니다. VAD의 인공 구조물 유형과 그 의미. 군용 교량에 대한 전술적 및 기술적 요구 사항. 군용 교량의 주요 부분, 설계 범위, 상부 구조물의 건설 높이, 도로 폭, 교량 개구부. 네 번째 질문입니다. 목적, 시스템, 재료, 위치, 도로, 서비스 수명, 도로의 길이 및 크기에 따라 교량을 분류합니다. 물 장벽을 가로지르는 다리와 그것을 구성하는 요소의 목적.
첫 번째 질문입니다. 도로군 예비군 장교 훈련에서 규율의 위치와 목적. 규율의 내용과 목표. 두 번째 질문입니다. 운영을 위한 도로 지원에서 교량의 역할과 중요성. 군 교량 건설에 대한 간략한 역사적 개요 세 번째 질문입니다. VAD의 인공 구조물 유형과 그 의미. 군용 교량에 대한 전술적 및 기술적 요구 사항. 군용 교량의 주요 부분, 설계 범위, 상부 구조물의 건설 높이, 도로 폭, 교량 개구부. 네 번째 질문입니다. 목적, 시스템, 재료, 위치, 도로, 서비스 수명, 도로의 길이 및 크기에 따라 교량을 분류합니다. 물 장벽을 가로지르는 다리와 그것을 구성하는 요소의 목적.
 문헌 1. 교과서 VPOZDV, 파트 I, pp. 3 -10; 2. 교과서 "VAD의 교량 및 건널목", pp. 3 -25.
문헌 1. 교과서 VPOZDV, 파트 I, pp. 3 -10; 2. 교과서 "VAD의 교량 및 건널목", pp. 3 -25.
 첫 번째 질문입니다. 도로군 예비군 장교 훈련에서 규율의 위치와 목적. 규율의 내용과 목표. 군사훈련은 조국을 위해 헌신하고 높은 사상적, 도덕적 자질을 갖추고 공무를 성공적으로 수행하는 데 필요한 지식, 기술, 능력을 갖춘 예비군 장교를 양성하는 것을 목표로 한다. 훈련의 주요 목적은 군 교량 설계에 필요한 이론적 지식을 갖춘 도로군 예비군 장교를 준비시키는 것입니다. 학문을 공부한 결과, 학생들은 다음과 같은 아이디어를 가져야 합니다: 군용 교량 및 건널목의 건설(부설) 기술 및 조직; 표준 분리형 교량 및 폰툰 공원의 주요 부분에 대한 작업 조직에 관한 것입니다. 알아 두십시오: 교량에 관한 기본 정보 저수위 및 착탈식 교량 설계; 일반 정보떠 다니는 다리와 페리 건널목에 대해; 교량 건설 지역 탐사 조직 및 교량 구조물 조달 지역. 가능: 기존 교량에 대한 정찰을 조직 및 수행하고, 교량 위의 차량 이동과 군사 도로의 인공 구조물을 조직합니다.
첫 번째 질문입니다. 도로군 예비군 장교 훈련에서 규율의 위치와 목적. 규율의 내용과 목표. 군사훈련은 조국을 위해 헌신하고 높은 사상적, 도덕적 자질을 갖추고 공무를 성공적으로 수행하는 데 필요한 지식, 기술, 능력을 갖춘 예비군 장교를 양성하는 것을 목표로 한다. 훈련의 주요 목적은 군 교량 설계에 필요한 이론적 지식을 갖춘 도로군 예비군 장교를 준비시키는 것입니다. 학문을 공부한 결과, 학생들은 다음과 같은 아이디어를 가져야 합니다: 군용 교량 및 건널목의 건설(부설) 기술 및 조직; 표준 분리형 교량 및 폰툰 공원의 주요 부분에 대한 작업 조직에 관한 것입니다. 알아 두십시오: 교량에 관한 기본 정보 저수위 및 착탈식 교량 설계; 일반 정보떠 다니는 다리와 페리 건널목에 대해; 교량 건설 지역 탐사 조직 및 교량 구조물 조달 지역. 가능: 기존 교량에 대한 정찰을 조직 및 수행하고, 교량 위의 차량 이동과 군사 도로의 인공 구조물을 조직합니다.




 두 번째 질문입니다. 운영을 위한 도로 지원에서 교량의 역할과 중요성. 군사 교량 건설에 대한 간략한 역사적 개요 작전 중 전투 임무에는 지속적인 수송이 필요합니다 물질적 자원그리고 국가의 후방에서 작전 현장까지의 인적 자원. 대조국전쟁에서 물질적 자원공급에 주요한 역할을 담당함 철도 운송. 도로 수송은 최종 하역역에서 군대 간 접촉선까지의 수송과 철도가 없거나 복구 중인 지역에서 사용되었습니다. 핵무기와 정밀무기를 사용하는 전쟁에서 도로 운송군사 고속도로가 급격히 증가하고 있습니다. 이러한 상황은 다음과 같은 작업에 대한 도로 지원을 특히 중요하게 만듭니다. 공통 시스템군대에 대한 물류 지원. 작전을 위한 도로 지원의 가장 중요한 구성 요소는 군사 도로의 준비, 운영, 기술 커버 및 복원입니다. 적대 행위 기간 동안 적은 가장 효과적으로 파괴되고 복원하기 어려운 물체인 군사 도로의 인공 구조물을 파괴하기 위해 통신에 적극적으로 영향을 미칠 것입니다. 통신의 인공 구조물에는 주로 모든 전쟁에서 중요한 역할을 한 교량이 포함됩니다.
두 번째 질문입니다. 운영을 위한 도로 지원에서 교량의 역할과 중요성. 군사 교량 건설에 대한 간략한 역사적 개요 작전 중 전투 임무에는 지속적인 수송이 필요합니다 물질적 자원그리고 국가의 후방에서 작전 현장까지의 인적 자원. 대조국전쟁에서 물질적 자원공급에 주요한 역할을 담당함 철도 운송. 도로 수송은 최종 하역역에서 군대 간 접촉선까지의 수송과 철도가 없거나 복구 중인 지역에서 사용되었습니다. 핵무기와 정밀무기를 사용하는 전쟁에서 도로 운송군사 고속도로가 급격히 증가하고 있습니다. 이러한 상황은 다음과 같은 작업에 대한 도로 지원을 특히 중요하게 만듭니다. 공통 시스템군대에 대한 물류 지원. 작전을 위한 도로 지원의 가장 중요한 구성 요소는 군사 도로의 준비, 운영, 기술 커버 및 복원입니다. 적대 행위 기간 동안 적은 가장 효과적으로 파괴되고 복원하기 어려운 물체인 군사 도로의 인공 구조물을 파괴하기 위해 통신에 적극적으로 영향을 미칠 것입니다. 통신의 인공 구조물에는 주로 모든 전쟁에서 중요한 역할을 한 교량이 포함됩니다.
 Great의 여러 주요 작업을 성공적으로 완료했습니다. 애국 전쟁교량 건널목의 건설, 강화, 복원 및 물 장벽을 건너는 페리 건널목 조직과 불가분의 관계가 있습니다. 따라서 전쟁 초기, 치열한 방어전이 벌어지는 동안 마을 근처에 높은 수위의 목조 다리가 건설되었습니다. 강을 건너는 다리인 보고로드스코예(Bogorodskoye), 미야즈니코보(Myaznikovo), 펜키노(Penkino)는 복선 교통을 위해 재건축되었습니다. Serpukhov 근처의 Oka와 Kolomna 근처에 목조 다리가 건설되었습니다. 1941년 전쟁 45 교량 건설에 특별한 관심을 기울일 것을 요구했다. 그 과정에서 교량 부대의 수는 11배 증가했으며 이는 인원 측면에서 도로 병력의 5분의 1에 달했습니다. 위대한 애국 전쟁 동안 도로 부대는 약 100,000km의 도로, 1,000km가 넘는 교량을 복원, 수리 및 건설했습니다. 여기에는 45.7km의 부교 건설, 288.9km의 저수교 건설 및 326.3km가 포함됩니다. 대수교량 중 기존 교량 462.6km를 보수 및 보강하였습니다. 군 도로 노동자들의 용기와 영웅주의의 상징은 전설적인 생명의 길입니다. 1941년 11월 동결이 가장 먼저 시작되자 레닌그라드 전선의 도로 노동자들은 얼음 도로에 대한 정찰을 실시했습니다. 합의 Vaganovo는 Zelenets Island를 거쳐 Ladoga Lake 역과 Kobona 마을까지 연결됩니다. 도로의 운영은 1941년 11월 22일에 시작되어 레닌그라드 포위 공격 기간 내내 계속되었습니다. 얼음길
Great의 여러 주요 작업을 성공적으로 완료했습니다. 애국 전쟁교량 건널목의 건설, 강화, 복원 및 물 장벽을 건너는 페리 건널목 조직과 불가분의 관계가 있습니다. 따라서 전쟁 초기, 치열한 방어전이 벌어지는 동안 마을 근처에 높은 수위의 목조 다리가 건설되었습니다. 강을 건너는 다리인 보고로드스코예(Bogorodskoye), 미야즈니코보(Myaznikovo), 펜키노(Penkino)는 복선 교통을 위해 재건축되었습니다. Serpukhov 근처의 Oka와 Kolomna 근처에 목조 다리가 건설되었습니다. 1941년 전쟁 45 교량 건설에 특별한 관심을 기울일 것을 요구했다. 그 과정에서 교량 부대의 수는 11배 증가했으며 이는 인원 측면에서 도로 병력의 5분의 1에 달했습니다. 위대한 애국 전쟁 동안 도로 부대는 약 100,000km의 도로, 1,000km가 넘는 교량을 복원, 수리 및 건설했습니다. 여기에는 45.7km의 부교 건설, 288.9km의 저수교 건설 및 326.3km가 포함됩니다. 대수교량 중 기존 교량 462.6km를 보수 및 보강하였습니다. 군 도로 노동자들의 용기와 영웅주의의 상징은 전설적인 생명의 길입니다. 1941년 11월 동결이 가장 먼저 시작되자 레닌그라드 전선의 도로 노동자들은 얼음 도로에 대한 정찰을 실시했습니다. 합의 Vaganovo는 Zelenets Island를 거쳐 Ladoga Lake 역과 Kobona 마을까지 연결됩니다. 도로의 운영은 1941년 11월 22일에 시작되어 레닌그라드 포위 공격 기간 내내 계속되었습니다. 얼음길
 레닌그라드와 레닌그라드 전선의 중요한 동맥이 되었습니다. 이를 통해 수십만 명의 생명을 구하고 도시를 방어할 수 있었습니다. 도로 부대의 어려운 임무는 강 건너편의 횡단을 조직하는 것이었습니다. 스탈린그라드 근처의 볼가. 사라토프-아스트라한 구역에서 가장 큰 물 장벽을 가로지르는 군대의 전투 작전을 보장하기 위해 42개의 페리 건널목과 가대 통로가 있는 6개의 부교가 강 건너편에 건설되었습니다. 볼가 삼각주의 악투바(Akhtuba)와 수로, 37개의 다리가 건설되었고 35개의 교차로가 건설되었습니다. 쿠르스크 전투 이전에 군 도로 노동자들은 10km가 넘는 새로운 교량을 건설했으며 오카 강, 돈 강, 보로네시 강 건너편의 교량을 포함하여 최대 12km의 기존 교량을 강화했습니다. 큰 역할키예프와 드네프로페트로프스크 근처에 있는 2개의 고수교를 포함하여 도로군이 건설한 45개의 건널목은 제1, 2, 3 우크라이나 전선군이 드니프르 강을 건너는 데 중요한 역할을 했습니다. 길이 1.8km, 금속으로 된 3개의 경간을 갖춘 드네프르 강 위의 키예프 다리는 3개월도 채 안 되어 건설되었습니다. 우리의 교량 건설 유닛은 엔지니어링 부대와 협력하여 미리 준비된 폰툰으로 하루 최대 300m의 속도로 교량을 건설하고 최대 150m의 저수교와 최대 20m의 고수교를 건설했습니다. 하루에. 벨로루시 작전 동안 도로군은 드네프르(Dnieper), 베레지나(Berezina), 볼호프(Volkhov), 소즈(Sozh), 데스나(Desna) 및 기타 강을 가로지르는 총 길이 63km의 35,000개의 다리와 인공 구조물을 건설하고 복원했습니다. 베를린 작전 중 당시 적의 최신 공격 수단 인 FAU 1 및 FAU 2 발사체의 공격으로 도로 군이 강 건너편에 34 개의 다리를 건설했습니다. Oder에서는 강을 건너는 16개의 다리가 복원되었습니다. 행위와 운하.
레닌그라드와 레닌그라드 전선의 중요한 동맥이 되었습니다. 이를 통해 수십만 명의 생명을 구하고 도시를 방어할 수 있었습니다. 도로 부대의 어려운 임무는 강 건너편의 횡단을 조직하는 것이었습니다. 스탈린그라드 근처의 볼가. 사라토프-아스트라한 구역에서 가장 큰 물 장벽을 가로지르는 군대의 전투 작전을 보장하기 위해 42개의 페리 건널목과 가대 통로가 있는 6개의 부교가 강 건너편에 건설되었습니다. 볼가 삼각주의 악투바(Akhtuba)와 수로, 37개의 다리가 건설되었고 35개의 교차로가 건설되었습니다. 쿠르스크 전투 이전에 군 도로 노동자들은 10km가 넘는 새로운 교량을 건설했으며 오카 강, 돈 강, 보로네시 강 건너편의 교량을 포함하여 최대 12km의 기존 교량을 강화했습니다. 큰 역할키예프와 드네프로페트로프스크 근처에 있는 2개의 고수교를 포함하여 도로군이 건설한 45개의 건널목은 제1, 2, 3 우크라이나 전선군이 드니프르 강을 건너는 데 중요한 역할을 했습니다. 길이 1.8km, 금속으로 된 3개의 경간을 갖춘 드네프르 강 위의 키예프 다리는 3개월도 채 안 되어 건설되었습니다. 우리의 교량 건설 유닛은 엔지니어링 부대와 협력하여 미리 준비된 폰툰으로 하루 최대 300m의 속도로 교량을 건설하고 최대 150m의 저수교와 최대 20m의 고수교를 건설했습니다. 하루에. 벨로루시 작전 동안 도로군은 드네프르(Dnieper), 베레지나(Berezina), 볼호프(Volkhov), 소즈(Sozh), 데스나(Desna) 및 기타 강을 가로지르는 총 길이 63km의 35,000개의 다리와 인공 구조물을 건설하고 복원했습니다. 베를린 작전 중 당시 적의 최신 공격 수단 인 FAU 1 및 FAU 2 발사체의 공격으로 도로 군이 강 건너편에 34 개의 다리를 건설했습니다. Oder에서는 강을 건너는 16개의 다리가 복원되었습니다. 행위와 운하.
 동유럽의 해방된 국가에서 도로군은 비스툴라 강, 오데르 강, 티자 강, 다뉴브 강 등을 가로지르는 큰 다리를 건설했습니다. 군 도로 노동자들의 용기와 영웅주의는 위대한 애국 전쟁 중 나치의 패배에 크게 기여했습니다. 군용 교량 건설 발전에 대한 간략한 역사적 개요 일반적으로 교량 건설 발전의 역사는 문명의 역사, 건설 예술 및 건축과 밀접하게 연결되어 있습니다. 대규모 중앙 집중식 국가의 출현으로 군사 전략 문제를 포함한 다양한 문제를 해결하는 데 매우 필요한 도로 네트워크 구축이 점점 더 중요해졌습니다. 고대에는 큰 강 위에 다리를 건설하는 일이 큰 어려움을 안겨주었습니다. 가장 어려웠던 부분은 지지대를 만드는 일이었습니다. 건설을 위해 강은 종종 새로운 인공 수로로 전환되었습니다. 로마인들은 지지대를 만들기 위해 바닥에 가라앉은 뚫을 수 없는 부주 상자를 사용했습니다. 따라서 큰 강을 건너기 위해 뗏목, 보트, 선박 형태의 떠다니는 지지대 위에 다리를 건설하는 경우가 많았습니다. 부교는 군사 상황에서 큰 물 장애물을 건너 군대를 수송하는 데 사용되었습니다.
동유럽의 해방된 국가에서 도로군은 비스툴라 강, 오데르 강, 티자 강, 다뉴브 강 등을 가로지르는 큰 다리를 건설했습니다. 군 도로 노동자들의 용기와 영웅주의는 위대한 애국 전쟁 중 나치의 패배에 크게 기여했습니다. 군용 교량 건설 발전에 대한 간략한 역사적 개요 일반적으로 교량 건설 발전의 역사는 문명의 역사, 건설 예술 및 건축과 밀접하게 연결되어 있습니다. 대규모 중앙 집중식 국가의 출현으로 군사 전략 문제를 포함한 다양한 문제를 해결하는 데 매우 필요한 도로 네트워크 구축이 점점 더 중요해졌습니다. 고대에는 큰 강 위에 다리를 건설하는 일이 큰 어려움을 안겨주었습니다. 가장 어려웠던 부분은 지지대를 만드는 일이었습니다. 건설을 위해 강은 종종 새로운 인공 수로로 전환되었습니다. 로마인들은 지지대를 만들기 위해 바닥에 가라앉은 뚫을 수 없는 부주 상자를 사용했습니다. 따라서 큰 강을 건너기 위해 뗏목, 보트, 선박 형태의 떠다니는 지지대 위에 다리를 건설하는 경우가 많았습니다. 부교는 군사 상황에서 큰 물 장애물을 건너 군대를 수송하는 데 사용되었습니다.
 뗏목으로 만든 부교는 쿨리코보 전투부터 위대한 애국 전쟁까지 러시아에서 널리 사용되었습니다. 1759년부터 러시아군은 안드레이 네미(Andrei Nemy) 대위가 개발한 캔버스 폰툰이 있는 폰툰 공원을 사용하기 시작했습니다. 이 공원은 100년 이상 존재했습니다. 19세기 전반. 러시아에서는 높이의 경간 도로를 조절하는 데 적합한 갠트리 지지대에 접이식 목조 다리를 설계하고 사용하기 시작했습니다. XIX 세기의 60년대. 콜롬나 공장은 군용 교량 건설 분야에서 프랑스와 독일을 앞지르는 세계 최초의 접이식 금속 교량 설계를 개발했습니다. 같은 해에 금속 폰툰을 갖춘 재미있는 폰툰 공원이 러시아에 나타났습니다. 더 집중적인 개발교량 사업은 소련군에 인수되었습니다. 1932년 39 최대 5m/h의 속도로 파일 지지대에 목재 교량을 건설하기 위한 매뉴얼이 개발되었습니다. 전쟁 테스트를 통과한 기계화 폰툰 공원 SP 9, DMP 42, DMP 45가 만들어지고 있습니다. 트랙터를 기반으로 범용 교량 건설 기계가 만들어졌습니다. 지역 재료로 만든 교량 설계는 전쟁 중에 널리 사용되었습니다. 1941년 도로군은 나무 바지선을 사용하여 다리를 건설했습니다. 얼마 후 그들은 단단한 지지대 위에 나무 다리를 건설하는 방법을 익히기 시작했습니다. 트러스는 제재소 시설의 부족을 보완하기 위해 큰 목재와 판으로 개발되었습니다. 저수교 교량의 설계가 대폭 단순화되어 건설 속도가 빨라졌습니다. 넓은 범위를 커버하기 위해 바닥에 탑승 장치가 있는 Gau Zhuravsky 트러스가 사용되었습니다. 전쟁 중 교량 운영 경험을 통해 원목 계산 시 허용 응력을 높일 수 있었습니다. 침엽수 종 130kgf/cm2에서 180kgf/cm2로 감소하여 산림 소비가 절약되었습니다.
뗏목으로 만든 부교는 쿨리코보 전투부터 위대한 애국 전쟁까지 러시아에서 널리 사용되었습니다. 1759년부터 러시아군은 안드레이 네미(Andrei Nemy) 대위가 개발한 캔버스 폰툰이 있는 폰툰 공원을 사용하기 시작했습니다. 이 공원은 100년 이상 존재했습니다. 19세기 전반. 러시아에서는 높이의 경간 도로를 조절하는 데 적합한 갠트리 지지대에 접이식 목조 다리를 설계하고 사용하기 시작했습니다. XIX 세기의 60년대. 콜롬나 공장은 군용 교량 건설 분야에서 프랑스와 독일을 앞지르는 세계 최초의 접이식 금속 교량 설계를 개발했습니다. 같은 해에 금속 폰툰을 갖춘 재미있는 폰툰 공원이 러시아에 나타났습니다. 더 집중적인 개발교량 사업은 소련군에 인수되었습니다. 1932년 39 최대 5m/h의 속도로 파일 지지대에 목재 교량을 건설하기 위한 매뉴얼이 개발되었습니다. 전쟁 테스트를 통과한 기계화 폰툰 공원 SP 9, DMP 42, DMP 45가 만들어지고 있습니다. 트랙터를 기반으로 범용 교량 건설 기계가 만들어졌습니다. 지역 재료로 만든 교량 설계는 전쟁 중에 널리 사용되었습니다. 1941년 도로군은 나무 바지선을 사용하여 다리를 건설했습니다. 얼마 후 그들은 단단한 지지대 위에 나무 다리를 건설하는 방법을 익히기 시작했습니다. 트러스는 제재소 시설의 부족을 보완하기 위해 큰 목재와 판으로 개발되었습니다. 저수교 교량의 설계가 대폭 단순화되어 건설 속도가 빨라졌습니다. 넓은 범위를 커버하기 위해 바닥에 탑승 장치가 있는 Gau Zhuravsky 트러스가 사용되었습니다. 전쟁 중 교량 운영 경험을 통해 원목 계산 시 허용 응력을 높일 수 있었습니다. 침엽수 종 130kgf/cm2에서 180kgf/cm2로 감소하여 산림 소비가 절약되었습니다.

 실습을 통해 표준 교량 구조의 사전 준비가 중요하다는 것이 입증되었으며, 이를 사용하여 저수교의 일일 건설 속도는 최대 80m에 도달하고 고수교는 하루 최대 8-12m에 이릅니다. 전쟁이 끝난 후, 이미 50년대에 도로군은 상공회의소와 LPP의 부주 공원, 접이식 교량 RMM 4, 현대식 파일링 장비 및 제재 장비를 받았습니다. 60년대에 도로군은 금속 접이식 도로 교량 MARM, SARM, BARM 세트를 받았는데, 이는 8시간 만에 저수교 조립을 보장하고 24~30시간 만에 고수교 건설을 보장했습니다. 현재 운행 중인 NARM 리본 부동 도로 교량과 견고한 지지대를 갖춘 RUM 접이식 범용 교량입니다. 70년대부터 세계 최고의 폰툰 함대인 PMP가 도로 부대에 장비를 공급하기 위해 공급되었습니다. 현재 도로군은 붕괴 가능한 교량을 개선하기 위해 많은 노력을 기울이고 있으며 기술적 수단건설을 위해 지역 선박 사용에 대한 새로운 건설적이고 조직적인 솔루션을 찾고 있습니다. 건축 자재.
실습을 통해 표준 교량 구조의 사전 준비가 중요하다는 것이 입증되었으며, 이를 사용하여 저수교의 일일 건설 속도는 최대 80m에 도달하고 고수교는 하루 최대 8-12m에 이릅니다. 전쟁이 끝난 후, 이미 50년대에 도로군은 상공회의소와 LPP의 부주 공원, 접이식 교량 RMM 4, 현대식 파일링 장비 및 제재 장비를 받았습니다. 60년대에 도로군은 금속 접이식 도로 교량 MARM, SARM, BARM 세트를 받았는데, 이는 8시간 만에 저수교 조립을 보장하고 24~30시간 만에 고수교 건설을 보장했습니다. 현재 운행 중인 NARM 리본 부동 도로 교량과 견고한 지지대를 갖춘 RUM 접이식 범용 교량입니다. 70년대부터 세계 최고의 폰툰 함대인 PMP가 도로 부대에 장비를 공급하기 위해 공급되었습니다. 현재 도로군은 붕괴 가능한 교량을 개선하기 위해 많은 노력을 기울이고 있으며 기술적 수단건설을 위해 지역 선박 사용에 대한 새로운 건설적이고 조직적인 솔루션을 찾고 있습니다. 건축 자재.
 1954년 상공회의소 폰툰 파크의 뱃머리 부분이 있는 무거운 폰툰 공원 ZIS 151 A의 부교. ZIL 157 E 섀시에 있는 가벼운 폰툰 파크 LPP의 중간 폰툰.
1954년 상공회의소 폰툰 파크의 뱃머리 부분이 있는 무거운 폰툰 공원 ZIS 151 A의 부교. ZIL 157 E 섀시에 있는 가벼운 폰툰 파크 LPP의 중간 폰툰.
 세 번째 질문입니다. VAD의 인공 구조물 유형과 그 의미. 군용 교량에 대한 전술적 및 기술적 요구 사항. 군용 교량의 주요 부분, 설계 범위, 상부 구조물의 건설 높이, 도로 폭, 교량 개구부. 고속도로의 주요 인공 구조물을 고려해야 합니다. 장애물 위로 도로를 연결하는 교량; 광산 장비를 사용하여 특별한 방법을 사용하여 복원이 수행되는 암석 두께의 장애물 아래에서 도로를 계속하는 터널; 눈사태와 낙석으로부터 도로를 보호하는 갤러리; 발코니 – 산악 도로의 캔틸레버 구조; 이류로부터 도로를 보호하는 이류 배수구; 옹벽, 쟁반, 사이펀, 필터 제방 등. 군사 도로에서는 교량 외에도 암거, 고가교, 육교, 고가도로, 터널 등과 같은 다른 인공 구조물이 종종 발견됩니다. 구조물 아래를 통과해야 하는 예상 물 흐름은 작습니다. 동시에 노반이 완전히 중단되지 않으므로 비용이 절감되고 공사 시간이 단축됩니다. 산간지역과 험난한 지형에 대한 군사도로 건설에서는 계곡과 협곡을 통과하는 고가교 건설이 필요하다. 고가교의 총 길이는 군사 고속도로의 예정 경로를 따라 지형에 따라 결정됩니다. 고가교는 종종 고속도로의 가파른 경사면과 회전 지점에 위치합니다. 군사 도로의 용량을 늘리려면 교차로뿐만 아니라 다양한 수준의 철도 교차로를 배치하고 장비하는 것이 좋습니다. 이를 위해 고가도로가 건설됩니다. 교량에 대한 편리한 접근 제공, 수많은 교통 차선에 대한 인터체인지 건설 및 접근 건설을 위한 굴착 작업 감소는 도로 노반을 고가도로 교체하는 경우에만 실현 가능한 경우가 많습니다.
세 번째 질문입니다. VAD의 인공 구조물 유형과 그 의미. 군용 교량에 대한 전술적 및 기술적 요구 사항. 군용 교량의 주요 부분, 설계 범위, 상부 구조물의 건설 높이, 도로 폭, 교량 개구부. 고속도로의 주요 인공 구조물을 고려해야 합니다. 장애물 위로 도로를 연결하는 교량; 광산 장비를 사용하여 특별한 방법을 사용하여 복원이 수행되는 암석 두께의 장애물 아래에서 도로를 계속하는 터널; 눈사태와 낙석으로부터 도로를 보호하는 갤러리; 발코니 – 산악 도로의 캔틸레버 구조; 이류로부터 도로를 보호하는 이류 배수구; 옹벽, 쟁반, 사이펀, 필터 제방 등. 군사 도로에서는 교량 외에도 암거, 고가교, 육교, 고가도로, 터널 등과 같은 다른 인공 구조물이 종종 발견됩니다. 구조물 아래를 통과해야 하는 예상 물 흐름은 작습니다. 동시에 노반이 완전히 중단되지 않으므로 비용이 절감되고 공사 시간이 단축됩니다. 산간지역과 험난한 지형에 대한 군사도로 건설에서는 계곡과 협곡을 통과하는 고가교 건설이 필요하다. 고가교의 총 길이는 군사 고속도로의 예정 경로를 따라 지형에 따라 결정됩니다. 고가교는 종종 고속도로의 가파른 경사면과 회전 지점에 위치합니다. 군사 도로의 용량을 늘리려면 교차로뿐만 아니라 다양한 수준의 철도 교차로를 배치하고 장비하는 것이 좋습니다. 이를 위해 고가도로가 건설됩니다. 교량에 대한 편리한 접근 제공, 수많은 교통 차선에 대한 인터체인지 건설 및 접근 건설을 위한 굴착 작업 감소는 도로 노반을 고가도로 교체하는 경우에만 실현 가능한 경우가 많습니다.






 군용 교량에 대한 전술적, 기술적 요구 사항 교량 또는 건널목 건설 현장은 우선 최소한의 작업량과 복원 시간을 기준으로 선택됩니다. 이 경우 접근로 건설 비용, 해당 지역의 울타리 및 소독 비용, 수로의 수리지질학적 조건, 교량 및 건설 위장 가능성, 보존 가능성 성능 품질교차로. 군용 교량에는 특정 전술적, 기술적 요구 사항이 적용됩니다. 전술적 요구 사항은 다음과 같습니다. 교량은 군대와 수송이 예상되는 지역, 교량 건설 유닛의 집중 및 교량 구조물의 보관에 적합하고 위장 특성이 있는 편리한 위장 접근 및 지형 구역을 가져야 합니다. 장애물에 대한 장치 및 조립 속도가 주요 요구 사항입니다. 교량의 용량은 VAD를 따라 이어지는 모든 군용 차량의 통과를 보장해야 합니다. 교량의 운반 능력은 VAD를 따르는 모든 군용 차량의 통과를 보장해야 합니다. 교량의 수명은 복원 유형과 일치해야 합니다. 3~5년 동안 연중 운영을 보장합니다. 리드 통과 및 얼음 표류를 보장하지 않고 20-30일 동안 운송 통과를 보장하기 위해 단기 교량이 건설됩니다. 건설 중에 사용되는 교량 구조물 및 기술 수단의 운송 가능성은 다음에 따라 도로 운송을 허용해야 합니다. 철도, 수로 및 항공 교량. 현지 자재 및 부유 장비(바지선, 보트, 보트)를 사용하여 서비스 교량을 비용 효율적으로 줄입니다. 작업의 비밀스럽고 분산된 생산, 작동 중인 작업의 위장, 이전에 준비된 작업의 신속한 복원을 통해 생존성이 보장됩니다.
군용 교량에 대한 전술적, 기술적 요구 사항 교량 또는 건널목 건설 현장은 우선 최소한의 작업량과 복원 시간을 기준으로 선택됩니다. 이 경우 접근로 건설 비용, 해당 지역의 울타리 및 소독 비용, 수로의 수리지질학적 조건, 교량 및 건설 위장 가능성, 보존 가능성 성능 품질교차로. 군용 교량에는 특정 전술적, 기술적 요구 사항이 적용됩니다. 전술적 요구 사항은 다음과 같습니다. 교량은 군대와 수송이 예상되는 지역, 교량 건설 유닛의 집중 및 교량 구조물의 보관에 적합하고 위장 특성이 있는 편리한 위장 접근 및 지형 구역을 가져야 합니다. 장애물에 대한 장치 및 조립 속도가 주요 요구 사항입니다. 교량의 용량은 VAD를 따라 이어지는 모든 군용 차량의 통과를 보장해야 합니다. 교량의 운반 능력은 VAD를 따르는 모든 군용 차량의 통과를 보장해야 합니다. 교량의 수명은 복원 유형과 일치해야 합니다. 3~5년 동안 연중 운영을 보장합니다. 리드 통과 및 얼음 표류를 보장하지 않고 20-30일 동안 운송 통과를 보장하기 위해 단기 교량이 건설됩니다. 건설 중에 사용되는 교량 구조물 및 기술 수단의 운송 가능성은 다음에 따라 도로 운송을 허용해야 합니다. 철도, 수로 및 항공 교량. 현지 자재 및 부유 장비(바지선, 보트, 보트)를 사용하여 서비스 교량을 비용 효율적으로 줄입니다. 작업의 비밀스럽고 분산된 생산, 작동 중인 작업의 위장, 이전에 준비된 작업의 신속한 복원을 통해 생존성이 보장됩니다.
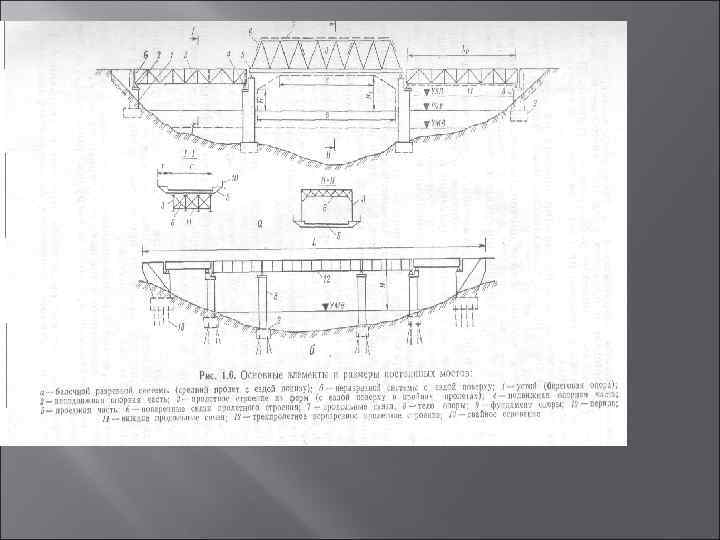
 군용 교량에서는 다음과 같은 기본 지정 및 정의가 사용됩니다. LP – 계산된 수위에서의 강의 폭; L - 교량의 길이(해안 지지대 축 사이의 거리) L 1 - 도로 데크를 따라 있는 교량의 전체 길이, 즉 교량 구조물이 접근 제방과 만나는 지점 사이. 내가 – 브리지 스팬 (인접한 지지대의 축 사이의 거리); 내가 0 – 설계 범위 (스팬 지지축 사이의 거리); Co는 지지대의 너비입니다. H – 지지 높이(지면에서 노즐 상단까지의 거리) hc – 경간 건설 높이(경간 바닥에서 도로 상단까지의 거리) ho – 지하교 높이(설계 수위에서 경간 바닥까지의 거리) Vpch – 도로 폭(휠 가드의 내부 가장자리 사이의 거리) Lc= lc – 맑은 경간 합계와 동일한 교량 개방 및 홍수의 통과 보장 계산에 의해 할당됨; H – 최대 수위에서 도로 표면까지의 교량 높이; h - 교량의 건설 높이, 데크 표면부터 경간 상부 구조의 가장 낮은 부분까지 측정됩니다. G – 휠 가드의 내부 가장자리 사이의 거리와 동일한 도로의 간격(군용 교량의 경우 일반적으로 교량 간격이라고 함)
군용 교량에서는 다음과 같은 기본 지정 및 정의가 사용됩니다. LP – 계산된 수위에서의 강의 폭; L - 교량의 길이(해안 지지대 축 사이의 거리) L 1 - 도로 데크를 따라 있는 교량의 전체 길이, 즉 교량 구조물이 접근 제방과 만나는 지점 사이. 내가 – 브리지 스팬 (인접한 지지대의 축 사이의 거리); 내가 0 – 설계 범위 (스팬 지지축 사이의 거리); Co는 지지대의 너비입니다. H – 지지 높이(지면에서 노즐 상단까지의 거리) hc – 경간 건설 높이(경간 바닥에서 도로 상단까지의 거리) ho – 지하교 높이(설계 수위에서 경간 바닥까지의 거리) Vpch – 도로 폭(휠 가드의 내부 가장자리 사이의 거리) Lc= lc – 맑은 경간 합계와 동일한 교량 개방 및 홍수의 통과 보장 계산에 의해 할당됨; H – 최대 수위에서 도로 표면까지의 교량 높이; h - 교량의 건설 높이, 데크 표면부터 경간 상부 구조의 가장 낮은 부분까지 측정됩니다. G – 휠 가드의 내부 가장자리 사이의 거리와 동일한 도로의 간격(군용 교량의 경우 일반적으로 교량 간격이라고 함)
 1 – 해안 지원; 2 – 셀 지원; 3 – 타워 지원; 4 – 평평한 지지대; 5 – 스팬 구조; 6 – 스팬의 하중 지지 부분; 7륜 릴리즈
1 – 해안 지원; 2 – 셀 지원; 3 – 타워 지원; 4 – 평평한 지지대; 5 – 스팬 구조; 6 – 스팬의 하중 지지 부분; 7륜 릴리즈

 교량 축은 도로 중앙을 달리는 가상의 선입니다. 지지대의 축은 지지대의 폭 중앙을 지나고 교량의 축에 수직인 가상의 선입니다. 지지대의 가장 바깥쪽 파일(랙)의 선은 중간 지지대의 가장 바깥쪽 파일(랙)의 축을 따라 교량을 따라 이어지는 가상의 선입니다. 대부분의 경우 교량은 특정 체제가 특징인 물 장벽을 가로질러 건설됩니다. 하천 체제는 일년 내내 또는 주어진 교량 운영 기간 동안 강의 행동입니다. 강 체제는 물 지평선의 변화, 결빙의 시기와 성격, 얼음 표류, 물 흐름 속도의 변화, 제트 흐름 방향의 변화 등으로 이해되어야 합니다. 강은 물 지평선을 변경합니다. 일년 내내: 여름에는 수심이 얕아지고, 폭우가 내리면 눈이 녹으면 물이 솟아오르는데, 이를 홍수라고 합니다. 여름의 홍수는 산지 강에서 흔히 발생하며, 가을과 봄에는 저지대 강에서 흔히 발생합니다. 봄에는 눈이 녹아 대부분의 저지대 강에서 물의 양이 크게 증가하여 제방이 범람합니다. 강의 이러한 상태를 홍수라고 합니다.
교량 축은 도로 중앙을 달리는 가상의 선입니다. 지지대의 축은 지지대의 폭 중앙을 지나고 교량의 축에 수직인 가상의 선입니다. 지지대의 가장 바깥쪽 파일(랙)의 선은 중간 지지대의 가장 바깥쪽 파일(랙)의 축을 따라 교량을 따라 이어지는 가상의 선입니다. 대부분의 경우 교량은 특정 체제가 특징인 물 장벽을 가로질러 건설됩니다. 하천 체제는 일년 내내 또는 주어진 교량 운영 기간 동안 강의 행동입니다. 강 체제는 물 지평선의 변화, 결빙의 시기와 성격, 얼음 표류, 물 흐름 속도의 변화, 제트 흐름 방향의 변화 등으로 이해되어야 합니다. 강은 물 지평선을 변경합니다. 일년 내내: 여름에는 수심이 얕아지고, 폭우가 내리면 눈이 녹으면 물이 솟아오르는데, 이를 홍수라고 합니다. 여름의 홍수는 산지 강에서 흔히 발생하며, 가을과 봄에는 저지대 강에서 흔히 발생합니다. 봄에는 눈이 녹아 대부분의 저지대 강에서 물의 양이 크게 증가하여 제방이 범람합니다. 강의 이러한 상태를 홍수라고 합니다.
 각 하천의 홍수 및 홍수의 특성은 해마다 다릅니다. 따라서 교량은 특정 운영 기간 동안 건설되며 이 기간 동안 가능한 최대 양력을 위해 설계됩니다. 수로의 특성에는 다음과 같은 지정이 허용됩니다. HWL - 높은 수위 - 홍수 또는 홍수 기간 동안 수년에 걸쳐 특정 강에서 관찰된 가장 높은 수위. LWL – 낮은 수위 – 이 강의 특징인 여름과 겨울의 가장 안정적인 수위입니다. RSU – 예상 항해 가능 수준; RUVV - 최고 수위 설계(교량 운영 전체 기간 동안 예상할 수 있는 최고 수위) UVL – 높은 얼음 표류 수준 – 가장 높은 얼음 표류의 수위; UNL – 낮은 얼음 표류 수준 – 가장 낮은 얼음 표류의 수위입니다.
각 하천의 홍수 및 홍수의 특성은 해마다 다릅니다. 따라서 교량은 특정 운영 기간 동안 건설되며 이 기간 동안 가능한 최대 양력을 위해 설계됩니다. 수로의 특성에는 다음과 같은 지정이 허용됩니다. HWL - 높은 수위 - 홍수 또는 홍수 기간 동안 수년에 걸쳐 특정 강에서 관찰된 가장 높은 수위. LWL – 낮은 수위 – 이 강의 특징인 여름과 겨울의 가장 안정적인 수위입니다. RSU – 예상 항해 가능 수준; RUVV - 최고 수위 설계(교량 운영 전체 기간 동안 예상할 수 있는 최고 수위) UVL – 높은 얼음 표류 수준 – 가장 높은 얼음 표류의 수위; UNL – 낮은 얼음 표류 수준 – 가장 낮은 얼음 표류의 수위입니다.
 강의 생활 구역 - 일부 교차 구역물로 씻겨지는 강. 주요 수로는 저수위 지평선의 생활 구역입니다. 왼쪽과 오른쪽 범람원은 강의 단면의 일부이며 오른쪽과 왼쪽은 저수변으로 둘러싸여 있습니다.
강의 생활 구역 - 일부 교차 구역물로 씻겨지는 강. 주요 수로는 저수위 지평선의 생활 구역입니다. 왼쪽과 오른쪽 범람원은 강의 단면의 일부이며 오른쪽과 왼쪽은 저수변으로 둘러싸여 있습니다.
 네 번째 질문입니다. 목적, 시스템, 재료, 위치, 도로, 서비스 수명, 도로의 길이 및 크기에 따라 교량을 분류합니다. 물 장벽을 가로지르는 다리와 그것을 구성하는 요소의 목적. 교량의 분류 군용 교량은 다양한 기준에 따라 분류됩니다. 교량은 수명에 따라 단기적일 수도 있고 임시적일 수도 있습니다. 단기. 교량은 짧은 사용 수명(몇 주에서 1년)을 위해 설계되었으며 디자인이 단순합니다. 이 다리는 얼음 표류나 만조에 대한 통로를 제공하지 않습니다. 단기 교량의 이동 속도는 다음과 같습니다. 느린 속도길에서. 운영 조건에 따라 단기 교량의 차량 속도와 중량에 대한 추가 제한을 허용하겠습니다. 단기 교량은 저수위, 수중 및 부유 교량일 수 있으며 파괴된 자본 구조의 보존된 구조에 대한 경간 및 지지대의 상부 구조 형태의 교량일 수 있습니다. 단기 복원 중에는 패들, 얼음 및 파일 얼음 횡단도 구성됩니다.
네 번째 질문입니다. 목적, 시스템, 재료, 위치, 도로, 서비스 수명, 도로의 길이 및 크기에 따라 교량을 분류합니다. 물 장벽을 가로지르는 다리와 그것을 구성하는 요소의 목적. 교량의 분류 군용 교량은 다양한 기준에 따라 분류됩니다. 교량은 수명에 따라 단기적일 수도 있고 임시적일 수도 있습니다. 단기. 교량은 짧은 사용 수명(몇 주에서 1년)을 위해 설계되었으며 디자인이 단순합니다. 이 다리는 얼음 표류나 만조에 대한 통로를 제공하지 않습니다. 단기 교량의 이동 속도는 다음과 같습니다. 느린 속도길에서. 운영 조건에 따라 단기 교량의 차량 속도와 중량에 대한 추가 제한을 허용하겠습니다. 단기 교량은 저수위, 수중 및 부유 교량일 수 있으며 파괴된 자본 구조의 보존된 구조에 대한 경간 및 지지대의 상부 구조 형태의 교량일 수 있습니다. 단기 복원 중에는 패들, 얼음 및 파일 얼음 횡단도 구성됩니다.
 임시 교량은 연중 내내 정상 작동하도록 설계되었으며 교량의 일정한 하중 용량을 유지하고 다른 구간에서의 이동에 비해 교량에서의 운송 속도가 크게 감소하지 않고 3~5년의 서비스 수명을 위해 설계되었습니다. 도로의. 임시 교량은 다음과 같습니다: 파괴된 주요 교량을 우회하여 현지 재료로 건설된 견고한 지지대 위에 있는 만조 교량; 회수 재산으로 조립된 견고한 지지대 위에 있는 고수위 교량. 전시 상황에서는 대부분 단기 교량을 건설해야 하고 덜 자주 임시 교량을 건설해야 합니다. 만조 및 얼음 표류의 통과를 보장하는 조건에 따라 교량은 고수, 저수, 수중 및 평활로 구분됩니다.
임시 교량은 연중 내내 정상 작동하도록 설계되었으며 교량의 일정한 하중 용량을 유지하고 다른 구간에서의 이동에 비해 교량에서의 운송 속도가 크게 감소하지 않고 3~5년의 서비스 수명을 위해 설계되었습니다. 도로의. 임시 교량은 다음과 같습니다: 파괴된 주요 교량을 우회하여 현지 재료로 건설된 견고한 지지대 위에 있는 만조 교량; 회수 재산으로 조립된 견고한 지지대 위에 있는 고수위 교량. 전시 상황에서는 대부분 단기 교량을 건설해야 하고 덜 자주 임시 교량을 건설해야 합니다. 만조 및 얼음 표류의 통과를 보장하는 조건에 따라 교량은 고수, 저수, 수중 및 평활로 구분됩니다.
 만조 교량은 연중 운영을 고려하여 건설되며 상당한 경간, 높은 지지대 및 상대적으로 복잡한 설계를 가지고 있습니다. 오카 강을 가로지르는 고수위 목조 다리
만조 교량은 연중 운영을 고려하여 건설되며 상당한 경간, 높은 지지대 및 상대적으로 복잡한 설계를 가지고 있습니다. 오카 강을 가로지르는 고수위 목조 다리
 저수위 교량은 물 위의 경간 높이가 최소이며 홍수가 많은 물과 얼음 표류에 대한 통로를 제공하지 않습니다. 이 교량은 경간이 작고 디자인이 단순하며 (계절 내) 수명이 짧습니다.
저수위 교량은 물 위의 경간 높이가 최소이며 홍수가 많은 물과 얼음 표류에 대한 통로를 제공하지 않습니다. 이 교량은 경간이 작고 디자인이 단순하며 (계절 내) 수명이 짧습니다.
 수중 교량의 경우 경간의 도로는 수위보다 30~50cm 아래에 위치하며 원자 폭발의 손상 요인에 더 강합니다. 충격파, 광선 방사), 또한 전체적으로 교량을 건너는 데보다 안정적인 위장을 제공합니다. Prolet 수중 다리를 건너는 탱크
수중 교량의 경우 경간의 도로는 수위보다 30~50cm 아래에 위치하며 원자 폭발의 손상 요인에 더 강합니다. 충격파, 광선 방사), 또한 전체적으로 교량을 건너는 데보다 안정적인 위장을 제공합니다. Prolet 수중 다리를 건너는 탱크
 플로팅 브리지는 플로팅 지지대 또는 플로팅 스트립 형태로 설치됩니다. 선박 통과를 위해 출구 링크 설치가 제공됩니다. 홍수와 얼음 표류 중에는 부교가 해체됩니다.
플로팅 브리지는 플로팅 지지대 또는 플로팅 스트립 형태로 설치됩니다. 선박 통과를 위해 출구 링크 설치가 제공됩니다. 홍수와 얼음 표류 중에는 부교가 해체됩니다.
 교량은 도로의 폭에 따라 단선과 복선으로 분류됩니다. 교량은 건축자재의 종류에 따라 목재, 금속, 철근콘크리트, 복합교량으로 구분됩니다. 크기에 따라 교량은 소형, 중형, 대형으로 구분됩니다. 작은 교량은 최대 길이 25m, 중간 - 25 ~ 100m, 대형 - 100m 이상의 교량이라고하며 시스템 (스팬의 정적 작동 방식)에 따라 교량은 빔, 스트럿, 트러스로 구분됩니다. , 아치, 서스펜션, 결합. 교량 시스템의 선택과 설계의 특징은 필요한 교량 범위, 지지대의 높이, 계획된 하중의 크기 및 사용 가능한 건축 자재에 따라 달라집니다. 사용되는 구조물의 특성에 따라 교량은 표준 구조물과 구별됩니다. 산업 생산품그리고 현지 군용 재료로 만든 것입니다. 서비스 교량에는 폰툰 파크와 견고한 지지대에 있는 접이식 교량이 포함됩니다. 장점은 재사용성, 짧은 조립 시간, 운송 중 이동성입니다. 군용 교량 요소의 경우 주로 현지 재료가 사용됩니다. 사전에 준비하거나 교량 건설 중에 준비할 수 있습니다. 일반적으로 도리 블록, 도로 패널 블록, 트랙 블록, Gau Zhuravsky 트러스, 보드 및 못 트러스 등을 미리 조립하여 전투 중 고속 교량 건설 문제를 적시에 해결합니다. 상황.
교량은 도로의 폭에 따라 단선과 복선으로 분류됩니다. 교량은 건축자재의 종류에 따라 목재, 금속, 철근콘크리트, 복합교량으로 구분됩니다. 크기에 따라 교량은 소형, 중형, 대형으로 구분됩니다. 작은 교량은 최대 길이 25m, 중간 - 25 ~ 100m, 대형 - 100m 이상의 교량이라고하며 시스템 (스팬의 정적 작동 방식)에 따라 교량은 빔, 스트럿, 트러스로 구분됩니다. , 아치, 서스펜션, 결합. 교량 시스템의 선택과 설계의 특징은 필요한 교량 범위, 지지대의 높이, 계획된 하중의 크기 및 사용 가능한 건축 자재에 따라 달라집니다. 사용되는 구조물의 특성에 따라 교량은 표준 구조물과 구별됩니다. 산업 생산품그리고 현지 군용 재료로 만든 것입니다. 서비스 교량에는 폰툰 파크와 견고한 지지대에 있는 접이식 교량이 포함됩니다. 장점은 재사용성, 짧은 조립 시간, 운송 중 이동성입니다. 군용 교량 요소의 경우 주로 현지 재료가 사용됩니다. 사전에 준비하거나 교량 건설 중에 준비할 수 있습니다. 일반적으로 도리 블록, 도로 패널 블록, 트랙 블록, Gau Zhuravsky 트러스, 보드 및 못 트러스 등을 미리 조립하여 전투 중 고속 교량 건설 문제를 적시에 해결합니다. 상황.
 교량은 하중 용량에 따라 고하중, 일반, 저하중, 저하중으로 분류됩니다. 증가된(80t) 하중 용량을 갖춘 교량은 모든 기존 하중의 이동을 보장합니다. 군용 도로에는 일반 하중(60t)의 교량을 건설하는 것이 좋습니다. 감소된(25톤 및 40톤) 적재 용량의 교량은 실제 화물 운송이 이 적재 용량에 해당하는 도로에 건설됩니다. 경량 교량은 도로 운송 전용 도로에 건설됩니다.
교량은 하중 용량에 따라 고하중, 일반, 저하중, 저하중으로 분류됩니다. 증가된(80t) 하중 용량을 갖춘 교량은 모든 기존 하중의 이동을 보장합니다. 군용 도로에는 일반 하중(60t)의 교량을 건설하는 것이 좋습니다. 감소된(25톤 및 40톤) 적재 용량의 교량은 실제 화물 운송이 이 적재 용량에 해당하는 도로에 건설됩니다. 경량 교량은 도로 운송 전용 도로에 건설됩니다.
 교량 건널목의 요소 계획된 서비스 수명 동안 교량의 정상적인 처리와 지속적인 작동을 보장하는 복잡한 엔지니어링 구조를 건널목이라고 합니다. 교량 횡단은 교량, 교량 접근 방식, 쇄빙기, 규제 구조 및 바닥 보강 장치로 구성됩니다. 에 따라 현지 상황및 전투 상황에서 다리와 다리 자체에 대한 접근을 제외하고 다리 건너기의 일부 요소가 누락될 수 있습니다. 다리는 다리 건너기의 주요 구조입니다. 스팬과 지지대로 구성됩니다. 스팬 구조는 지지대 사이의 간격(스팬)을 메우기 위해 설계되었으며 도로와 하중을 지탱하는 부분으로 구성됩니다.
교량 건널목의 요소 계획된 서비스 수명 동안 교량의 정상적인 처리와 지속적인 작동을 보장하는 복잡한 엔지니어링 구조를 건널목이라고 합니다. 교량 횡단은 교량, 교량 접근 방식, 쇄빙기, 규제 구조 및 바닥 보강 장치로 구성됩니다. 에 따라 현지 상황및 전투 상황에서 다리와 다리 자체에 대한 접근을 제외하고 다리 건너기의 일부 요소가 누락될 수 있습니다. 다리는 다리 건너기의 주요 구조입니다. 스팬과 지지대로 구성됩니다. 스팬 구조는 지지대 사이의 간격(스팬)을 메우기 위해 설계되었으며 도로와 하중을 지탱하는 부분으로 구성됩니다.
 도로는 운전하기에 편안한 표면을 만들고, 움직이는 하중으로부터 힘을 흡수하고 이러한 힘을 하중 지지 부분으로 전달합니다. 하중 지지 부분은 도로의 하중을 흡수하고 이러한 하중과 자체 중량의 힘을 지지대에 전달하도록 설계되었습니다. 인접한 지지대 사이의 거리가 멀수록 지지 부품의 설계가 더 복잡해지고 그 반대도 마찬가지입니다. 작은 거리(스팬)의 경우 가장 단순한 하중 지지 부분이 지지대 위에 놓인 대들보라고 불리는 일련의 빔 형태로 사용됩니다. 넓은 범위의 경우 다양한 유형의 트러스 또는 큰 단면과 높이 치수의 견고한 벽을 갖춘 금속 빔이 하중 지지 부품으로 사용됩니다. 지지대는 필요한 높이에서 경간을 지지하고 경간에서 지면으로 모든 힘을 전달하도록 설계되었습니다. 군용 교량 건설에는 나무로 만든 다리가 사용됩니다. 장벽의 특성에 따라 파일, 프레임, 파일 프레임, 케이지 또는 코드가 될 수 있습니다. 교량 진입로는 교량에 바로 인접한 도로 구간으로 도로와 도로를 연결합니다. 지형 여건에 따라 제방이나 굴착 형태로 배치할 수 있다.
도로는 운전하기에 편안한 표면을 만들고, 움직이는 하중으로부터 힘을 흡수하고 이러한 힘을 하중 지지 부분으로 전달합니다. 하중 지지 부분은 도로의 하중을 흡수하고 이러한 하중과 자체 중량의 힘을 지지대에 전달하도록 설계되었습니다. 인접한 지지대 사이의 거리가 멀수록 지지 부품의 설계가 더 복잡해지고 그 반대도 마찬가지입니다. 작은 거리(스팬)의 경우 가장 단순한 하중 지지 부분이 지지대 위에 놓인 대들보라고 불리는 일련의 빔 형태로 사용됩니다. 넓은 범위의 경우 다양한 유형의 트러스 또는 큰 단면과 높이 치수의 견고한 벽을 갖춘 금속 빔이 하중 지지 부품으로 사용됩니다. 지지대는 필요한 높이에서 경간을 지지하고 경간에서 지면으로 모든 힘을 전달하도록 설계되었습니다. 군용 교량 건설에는 나무로 만든 다리가 사용됩니다. 장벽의 특성에 따라 파일, 프레임, 파일 프레임, 케이지 또는 코드가 될 수 있습니다. 교량 진입로는 교량에 바로 인접한 도로 구간으로 도로와 도로를 연결합니다. 지형 여건에 따라 제방이나 굴착 형태로 배치할 수 있다.
 접근 제방의 높이는 1.5-2m 이하로 설정하는 것이 좋으며, 높이가 높을수록 접근 제방을 견고한 지지대 위의 교량 육교로 교체하는 것이 더 유리합니다. 물로 인한 접근로의 범람을 방지하려면 제방의 높이가 예상되는 최고 수위보다 높아야 합니다. 저수위 교량에 접근하는 경우 - 최소 1m 교량에서 직접 원추형 채우기 또는 울타리 벽이 있는 제방 끝 형태로 접근합니다. 높이, 제방을 따라 흐르는 물의 속도, 제방 자체의 토양 유형 및 경사면 바닥에 따라 제방 경사면의 가파른 정도는 1 : 1–1 : 2로 가정됩니다. 그리고 점토와 양토 토양의 경우 강한 파도와 빠른 유속 - 1 : 2, 5 1 : 3. 원뿔의 정면 경사면의 가파른 정도는 1 : 1에서 1 : 1.75로 지정됩니다. 길이가 1.5m를 초과하는 경우 노반 가장자리를 따라 양쪽에 1.5m 5 2m마다 설치된 수직 홈 형태로 제방 교통 안전을 위해 제한 장치를 설치해야합니다. 교량에서 150~200m 거리에서는 손상된 차량을 수용하고 우회를 용이하게 하며 적군 공격 시 수송을 중지할 수 있도록 가능한 경우 최소 100m 길이로 접근로를 확장해야 합니다. 공격. 접근로 근처에는 인원과 장비를 위한 대피소가 마련되어 있습니다. 자연 대피소가 있는 접근 지역에는 출구가 만들어지고 대피소가 있음을 나타내는 표지판이 배치됩니다. 교량 건널목에서는 범람원에 긴 제방을 건설할 때, 높은 홍수량이 통과하는 기간 동안 물 흐름의 생활 단면에 강한 제약이 형성됩니다. 원뿔 근처, 제방을 따라, 다리의 지지대와 얼음 절단기에서 다양한 소용돌이와 소용돌이가 형성되어 기초가 침식됩니다. 침식을 제거하고 홍수 물의 원활한 흐름을 보장하기 위해 규제 구조물(하천 안내 댐, 횡단 등)이 교량 아래에 설치됩니다.
접근 제방의 높이는 1.5-2m 이하로 설정하는 것이 좋으며, 높이가 높을수록 접근 제방을 견고한 지지대 위의 교량 육교로 교체하는 것이 더 유리합니다. 물로 인한 접근로의 범람을 방지하려면 제방의 높이가 예상되는 최고 수위보다 높아야 합니다. 저수위 교량에 접근하는 경우 - 최소 1m 교량에서 직접 원추형 채우기 또는 울타리 벽이 있는 제방 끝 형태로 접근합니다. 높이, 제방을 따라 흐르는 물의 속도, 제방 자체의 토양 유형 및 경사면 바닥에 따라 제방 경사면의 가파른 정도는 1 : 1–1 : 2로 가정됩니다. 그리고 점토와 양토 토양의 경우 강한 파도와 빠른 유속 - 1 : 2, 5 1 : 3. 원뿔의 정면 경사면의 가파른 정도는 1 : 1에서 1 : 1.75로 지정됩니다. 길이가 1.5m를 초과하는 경우 노반 가장자리를 따라 양쪽에 1.5m 5 2m마다 설치된 수직 홈 형태로 제방 교통 안전을 위해 제한 장치를 설치해야합니다. 교량에서 150~200m 거리에서는 손상된 차량을 수용하고 우회를 용이하게 하며 적군 공격 시 수송을 중지할 수 있도록 가능한 경우 최소 100m 길이로 접근로를 확장해야 합니다. 공격. 접근로 근처에는 인원과 장비를 위한 대피소가 마련되어 있습니다. 자연 대피소가 있는 접근 지역에는 출구가 만들어지고 대피소가 있음을 나타내는 표지판이 배치됩니다. 교량 건널목에서는 범람원에 긴 제방을 건설할 때, 높은 홍수량이 통과하는 기간 동안 물 흐름의 생활 단면에 강한 제약이 형성됩니다. 원뿔 근처, 제방을 따라, 다리의 지지대와 얼음 절단기에서 다양한 소용돌이와 소용돌이가 형성되어 기초가 침식됩니다. 침식을 제거하고 홍수 물의 원활한 흐름을 보장하기 위해 규제 구조물(하천 안내 댐, 횡단 등)이 교량 아래에 설치됩니다.
 하천 제방은 일반적으로 한쪽 또는 양쪽 제방에 큰 범람원이 있는 강에 건설됩니다. 계획 중인 댐의 개요는 하천 체계 연구에서 얻은 데이터를 기반으로 결정됩니다. 곡선형이거나 곡선형 부품과 직선 인서트로 구성될 수 있습니다. 종종 댐의 윤곽은 포물선에 의해 결정됩니다. 댐의 머리 부분은 폭이 4-5m까지 배열되고 하천 부분의 경사는 1 : 2보다 가파르지 않게 배열됩니다. 홍수로 인한 침식으로부터 제방을 보호하기 위해 상류쪽에 횡단 장치가 설치되며 때로는 하류 측에서는 제방을 따라 발생하는 전류를 편향시킵니다. 규제 구조물은 원칙적으로 주요 도로의 교량 건설 중에는 세워지지 않지만 대형 물 장벽 위의 교량을 임시로 복원하는 동안 작동 상태로 전환하고 운영해야 합니다. 겨울에 얼음으로 뒤덮인 강에서는 얼음이 표류하는 동안 얼음에 노출되어 발생할 수 있는 손상으로부터 목조 다리의 지지대를 보호해야 합니다. 얼음의 충격은 교량에 가장 큰 위험을 초래합니다. 특히 얼음 충격의 높은 힘으로 인해 얼음이 심하게 표류하는 동안 교통 정체가 형성되기 때문에 더욱 그렇습니다. 지지대를 보호하기 위해 제빙기가 설치되는데, 그 목적은 큰 빙원을 분쇄하고, 빙원의 충격으로부터 교량 지지대를 보호하며, 떠다니는 빙원을 교량 경간으로 직접 보내는 것입니다. 가장 깊은 얼음 표류는 가장 깊은 곳과 강 속도가 가장 큰 곳에서 관찰되므로 교량의 강 지지대를 보호하는 데 주된 관심을 기울여야 합니다. 대부분의 경우 범람원 지역의 지지대는 가벼운 제빙기로 보호할 수 있지만 해안 지역의 지지대는 일반적으로 얼음으로부터 보호할 필요가 없습니다. 아이스 커터는 위치에 따라 브리지 커터와 아웃포스트 커터로 구분됩니다.
하천 제방은 일반적으로 한쪽 또는 양쪽 제방에 큰 범람원이 있는 강에 건설됩니다. 계획 중인 댐의 개요는 하천 체계 연구에서 얻은 데이터를 기반으로 결정됩니다. 곡선형이거나 곡선형 부품과 직선 인서트로 구성될 수 있습니다. 종종 댐의 윤곽은 포물선에 의해 결정됩니다. 댐의 머리 부분은 폭이 4-5m까지 배열되고 하천 부분의 경사는 1 : 2보다 가파르지 않게 배열됩니다. 홍수로 인한 침식으로부터 제방을 보호하기 위해 상류쪽에 횡단 장치가 설치되며 때로는 하류 측에서는 제방을 따라 발생하는 전류를 편향시킵니다. 규제 구조물은 원칙적으로 주요 도로의 교량 건설 중에는 세워지지 않지만 대형 물 장벽 위의 교량을 임시로 복원하는 동안 작동 상태로 전환하고 운영해야 합니다. 겨울에 얼음으로 뒤덮인 강에서는 얼음이 표류하는 동안 얼음에 노출되어 발생할 수 있는 손상으로부터 목조 다리의 지지대를 보호해야 합니다. 얼음의 충격은 교량에 가장 큰 위험을 초래합니다. 특히 얼음 충격의 높은 힘으로 인해 얼음이 심하게 표류하는 동안 교통 정체가 형성되기 때문에 더욱 그렇습니다. 지지대를 보호하기 위해 제빙기가 설치되는데, 그 목적은 큰 빙원을 분쇄하고, 빙원의 충격으로부터 교량 지지대를 보호하며, 떠다니는 빙원을 교량 경간으로 직접 보내는 것입니다. 가장 깊은 얼음 표류는 가장 깊은 곳과 강 속도가 가장 큰 곳에서 관찰되므로 교량의 강 지지대를 보호하는 데 주된 관심을 기울여야 합니다. 대부분의 경우 범람원 지역의 지지대는 가벼운 제빙기로 보호할 수 있지만 해안 지역의 지지대는 일반적으로 얼음으로부터 보호할 필요가 없습니다. 아이스 커터는 위치에 따라 브리지 커터와 아웃포스트 커터로 구분됩니다.

 교량교량은 지지대와 결합된 구조를 가질 수도 있고, 지지대와 일정 거리를 두고 분리된 구조물의 형태를 가질 수도 있다. 제빙기에서 지지대까지의 거리는 해류의 속도에 따라 결정됩니다. 빠른 흐름 중에 쇄빙기가 지지대에 너무 가깝게 배치되면 쇄빙기에 부딪혀 부서지는 유빙이 지지대를 손상시킬 시간이 생길 수 있습니다. 따라서 빠른 흐름에서는 약한 흐름보다 더 먼 거리에서 제빙기가 지지대에서 제거됩니다. 아이스 커터의 너비는 지지대 너비보다 약간 크거나 극단적인 경우 동일하게 설정됩니다. 특히 얼음 표류가 강한 강에서는 한 줄의 쇄빙기에 국한되지 않고 첫 번째 줄 앞에 전초 기지라고 불리는 두 번째 줄의 쇄빙기를 배치합니다. 그들은 빙원의 가장 강력한 충격을 받아 그것을 더 작은 조각으로 부숴버립니다. 이러한 제빙기는 현재 속도가 가장 높은 메인 채널에만 설치됩니다. 군용 고수위 교량을 건설할 때 일반 클러스터, 강화 클러스터, 평면형(1열, 2열), 원통형, 텐트형 등의 유형의 쇄빙기가 사용됩니다. 바닥 및 둑 보호 장치는 교량 건널목의 수명을 늘리는 데 도움이 됩니다.
교량교량은 지지대와 결합된 구조를 가질 수도 있고, 지지대와 일정 거리를 두고 분리된 구조물의 형태를 가질 수도 있다. 제빙기에서 지지대까지의 거리는 해류의 속도에 따라 결정됩니다. 빠른 흐름 중에 쇄빙기가 지지대에 너무 가깝게 배치되면 쇄빙기에 부딪혀 부서지는 유빙이 지지대를 손상시킬 시간이 생길 수 있습니다. 따라서 빠른 흐름에서는 약한 흐름보다 더 먼 거리에서 제빙기가 지지대에서 제거됩니다. 아이스 커터의 너비는 지지대 너비보다 약간 크거나 극단적인 경우 동일하게 설정됩니다. 특히 얼음 표류가 강한 강에서는 한 줄의 쇄빙기에 국한되지 않고 첫 번째 줄 앞에 전초 기지라고 불리는 두 번째 줄의 쇄빙기를 배치합니다. 그들은 빙원의 가장 강력한 충격을 받아 그것을 더 작은 조각으로 부숴버립니다. 이러한 제빙기는 현재 속도가 가장 높은 메인 채널에만 설치됩니다. 군용 고수위 교량을 건설할 때 일반 클러스터, 강화 클러스터, 평면형(1열, 2열), 원통형, 텐트형 등의 유형의 쇄빙기가 사용됩니다. 바닥 및 둑 보호 장치는 교량 건널목의 수명을 늘리는 데 도움이 됩니다.

검색 결과의 범위를 좁히려면 검색할 필드를 지정하여 쿼리를 구체화할 수 있습니다. 필드 목록은 위에 표시됩니다. 예를 들어:
동시에 여러 필드를 검색할 수 있습니다.
논리 연산자
기본 연산자는 다음과 같습니다. 그리고.
운영자 그리고이는 문서가 그룹의 모든 요소와 일치해야 함을 의미합니다.
연구 개발
운영자 또는이는 문서가 그룹의 값 중 하나와 일치해야 함을 의미합니다.
공부하다 또는개발
운영자 아니다다음을 포함하는 문서는 제외됩니다. 이 요소:
공부하다 아니다개발
검색 유형
쿼리 작성 시 해당 구문을 검색할 방법을 지정할 수 있습니다. 형태론을 고려한 검색, 형태론 없는 검색, 접두사 검색, 구문 검색의 네 가지 방법이 지원됩니다.
기본적으로 검색은 형태를 고려하여 수행됩니다.
형태론 없이 검색하려면 구문의 단어 앞에 "달러" 기호를 넣으세요.
$ 공부하다 $ 개발
접두사를 검색하려면 쿼리 뒤에 별표를 넣어야 합니다.
공부하다 *
구문을 검색하려면 쿼리를 큰따옴표로 묶어야 합니다.
" 연구 및 개발 "
동의어로 검색
검색 결과에 단어의 동의어를 포함하려면 해시를 입력해야 합니다. #
" 단어 앞이나 괄호 안의 표현 앞.
하나의 단어에 적용하면 해당 단어에 대한 동의어를 최대 3개까지 찾을 수 있습니다.
괄호 표현에 적용하면 각 단어에 동의어가 있으면 해당 단어에 동의어가 추가됩니다.
형태론 없는 검색, 접두사 검색 또는 구문 검색과 호환되지 않습니다.
# 공부하다
그룹화
검색 문구를 그룹화하려면 대괄호를 사용해야 합니다. 이를 통해 요청의 부울 논리를 제어할 수 있습니다.
예를 들어, 요청을 해야 합니다. 저자가 Ivanov 또는 Petrov이고 제목에 연구 또는 개발이라는 단어가 포함된 문서를 찾으십시오.
대략적인 단어 검색
대략적인 검색을 위해서는 물결표를 입력해야 합니다." ~ " 문구의 단어 끝에 표시됩니다. 예를 들면 다음과 같습니다.
브롬 ~
검색하면 "브롬", "럼", "산업용" 등과 같은 단어가 검색됩니다.
추가로 지정할 수 있습니다. 최대 금액가능한 편집: 0, 1 또는 2. 예:
브롬 ~1
기본적으로 2번의 수정이 허용됩니다.
근접성 기준
근접성 기준으로 검색하려면 물결표를 입력해야 합니다. ~ "라는 문구 끝에 있습니다. 예를 들어 2단어 내에 연구 및 개발이라는 단어가 포함된 문서를 찾으려면 다음 쿼리를 사용합니다.
" 연구 개발 "~2
표현의 관련성
검색에서 개별 표현의 관련성을 변경하려면 " 기호를 사용하세요. ^
" 표현의 끝에는 다른 표현과 관련하여 이 표현의 관련성 수준이 표시됩니다.
레벨이 높을수록 표현의 관련성이 높아집니다.
예를 들어, 다음 표현에서 "research"라는 단어는 "development"라는 단어보다 4배 더 관련성이 높습니다.
공부하다 ^4 개발
기본적으로 레벨은 1입니다. 유효한 값은 양의 실수입니다.
간격 내에서 검색
필드의 값이 위치해야 하는 간격을 표시하려면 경계값을 괄호 안에 연산자로 구분하여 표시해야 합니다. 에게.
사전식 정렬이 수행됩니다.
이러한 쿼리는 작성자가 Ivanov에서 시작하여 Petrov로 끝나는 결과를 반환하지만 Ivanov와 Petrov는 결과에 포함되지 않습니다.
범위에 값을 포함하려면 대괄호를 사용하세요. 값을 제외하려면 중괄호를 사용하세요.
B 교량 건설 중 장벽에서 수행되는 작업에는 건설 영역의 엔지니어링 정찰 및 교량 구조물 조달, 교량으로의 접근 도로 준비, 교량 구조물의 하역 및 보관 영역 준비, 교량 축 및 지지 축 배치, 교량 건설을 위한 기계화 장비 배치, 입구 장치 건설, 중간 지지대 건설, 지지대에 경간 배치, 세로 연결 설치, 교량 폐쇄.
또한, 높이의 프레임(케이지) 지지대를 설치 장소에서 조립할 수 있으며 마감 경간, 라이닝, 파일 등의 개별 요소(퍼린)도 제작할 수 있습니다.
교량 건설 작업을 수행하기 위해 교량 건설 장비가 배치되는 인접한 제방이 있는 강 구간에 건설 현장이 설치됩니다.
교량 건설은 길이, 가용 힘 및 교량 건설 장비에 따라 하나 또는 여러 섹션으로 수행됩니다.
다리는 여러 구역으로 건설되고 있습니다.
두 부분으로 - 은행에서 장애물 중앙까지;
둑에서 장애물 중앙까지, 중간 구역 - 한 해안 구역 끝에서 다른 해안 구역 끝까지의 세 구역으로 구성됩니다.
둑에서 장애물 중앙까지, 중간 구역 - 장애물 중앙에서 해안 구역까지의 4개 구역으로 구성됩니다.
건널목 건널목 유형 및 방법
교차점은 군대가 가능한 방법 중 하나로 물 장벽을 직접 극복하는 인접 지형과 물 장벽의 한 부분입니다. 적군이 반대편 둑을 방어하는 전투에서 물 장애물을 극복하는 것을 횡단이라고합니다. 군대의 횡단은 영구 교량 및 횡단, 전투 및 특수 부유 장비, 엔지니어링 군대의 교량 장비 횡단, 포드, 지역 선박 및 재료 및 얼음 덮개를 사용하여 수행될 수 있습니다. 이에 따라 착륙, 페리, 교량, 포드 횡단, 수중 탱크 횡단 및 얼음 횡단과 같은 유형의 횡단이 구별됩니다.
공격 부대의 첫 번째 제대 부대가 물 장애물을 신속하고 분산적으로 극복할 수 있도록 상륙 교차점을 갖추고 있습니다. 이는 전투 및 특수 부동 차량, 부동 컨베이어, 보트 및 즉석 수단에서 수행됩니다.
페리 건널목은 군용 및 특수 장비, 주로 탱크, 포병 시설, 방공 시스템 및 인력의 건널목을 위한 시설을 갖추고 있습니다. 페리 횡단 장비에는 자체 추진 페리 GSP, PMM-1, PMM-2가 사용됩니다. 폰툰 파크 PMP, PP-91, PPS-84의 자재 부분과 바지선 및 보트 형태의 지역 선박으로 조립된 다양한 운반 능력을 갖춘 운송 페리.
교량 건널목은 군용 기둥이 물의 장애물을 극복하고 최대의 처리 용량을 가질 수 있도록 보장합니다. 교량 횡단을 장비하기 위해 우선 영구 교량이 사용되며, 부재 또는 파괴된 경우 다음이 사용됩니다: 폰툰 공원 또는 바지선의 부교, 현지 재료로 군대가 건설한 견고한 지지대 위의 교량; 기계화 또는 접이식 교량 및 복합교량.
포드 건널목은 물 장벽의 깊이와 속도, 바닥과 제방의 토양, 경사로 및 출구가 자체 힘으로 장비나 인력의 논스톱 이동을 허용하는 곳으로 구성됩니다.
수중 탱크 교차는 탱크 수중 주행(OPVT)을 위한 추가 장비를 사용하여 수행됩니다. 동시에, 물 장벽의 깊이는 5.0m를 초과해서는 안 되며, 유속은 1.5m/s를 초과해서는 안 되며, 바닥과 제방의 토양, 경사로와 출구의 가파른 정도가 탱크의 이동을 허용해야 합니다. 끊임없는.
겨울에는 동결 기간 동안 얼음 횡단 시설이 설치됩니다. 얼음의 두께와 구조에 따라 인력과 장비의 교차는 눈이 제거된 경로를 따라 단일 순서 또는 기둥으로 수행될 수 있습니다.